Descripció
1.Model de producte

Model: DH12S-P6S
Equipament aplicable:serra de filferro / màquina de serra de fulla
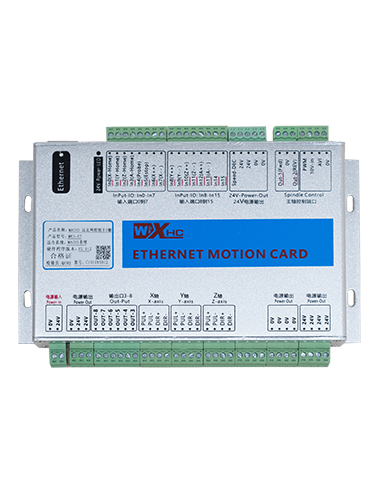
2.Diagrama d’accessoris de producte

Nota: Podeu triar una de les tres antenes. L'antena de la tassa de succió és estàndard per defecte.
3.Descripció del commutador de control remot

4.Presentació del contingut de la pantalla

Velocitat del motor principal: Principal: 0-50
Velocitat del motor de desplaçament: Línia: 0-50
Límit màxim de velocitat del motor de desplaçament de tall automàtic: Velocitat: 0-30
(paràmetres ajustables)
Corrent de configuració del motor principal de tall automàtic: Configuració: 28 (paràmetres ajustables)
Velocitat del motor del braç basculant: Swing: 0-50

Baixa tensió: La bateria de control remot és massa baixa, Substituïu la bateria.

La xarxa va caure: El senyal sense fils s’interromp. Comproveu la potència del receptor, Potencia’l de nou, i reinicieu el control remot.
5.Instruccions de funcionament de la funció de control remot
1) Enceneu el comandament a distància
Quan el receptor s’encén, la llum d'alimentació D2 del receptor està sempre encesa, i la llum de senyal D1 comença a parpellejar; Instal·leu dues bateries AA al comandament a distància, Engegueu l’interruptor d’alimentació, i la pantalla mostrarà la velocitat del motor, indicant una startup amb èxit.
2) Gran motor i regulació de velocitat/motor principal i regulació de velocitat
Mantén premut “Habilitació de regulació de velocitat”, gira el “Endavant/marrere” canviar a endavant, i el motor principal del receptor s'encendrà;
Mantén premut “Habilitació de regulació de velocitat”, gira el “Endavant/marrere” canviar al revés, i el motor principal del receptor invertirà i s'encendrà;Simplement moveu l'interruptor a la direcció mitjana o inversa, i el motor principal s'aturarà immediatament sense prémer el botó d'habilitació del control de velocitat;Gira el “gran motor” botó per ajustar la tensió de regulació de velocitat de l'inversor del motor principal del receptor a 0-10V;
3) Motor de viatge
Mantén premut “Habilitació d'ajust de velocitat”, gira el “Endavant/marrere” canviar a endavant o enrere, i el motor que camina es mourà a una gran velocitat de 50;
4) Motor de braç basculant i regulació de velocitat
Gireu el “Braç oscil·lant/marrere” canviar al braç oscil·lant o a la retirada, i el motor del braç oscil·lant del receptor arrenca; després gireu “Ajust de velocitat” botó per ajustar la velocitat del motor del braç oscil·lant;
Mantén premut “Habilitació d'ajust de velocitat”, i després estira el “Braç oscil·lant/marrere” interruptor, el motor del braç oscil·lant es mourà a una gran velocitat de 50;
5)Ajust del límit de velocitat del motor de viatge
Manteniu premut el botó “Habilitació d'ajust de velocitat” botó i gireu “ajust de velocitat” per ajustar el límit de velocitat màxim del motor de desplaçament durant el tall automàtic;
6) Tall automàtic
El primer pas és posar en marxa el motor principal; el segon pas és ajustar el límit de velocitat màxim del motor que camina; el tercer pas és moure el “endavant/marrere” canvieu cap endavant o cap enrere per entrar al mode de tall automàtic;
7) Menú de paràmetres (els usuaris tenen prohibit modificar-lo sense permís)
Entra al menú de paràmetres:En mode manual, quan la velocitat del motor principal és 0, premeu l'interruptor endavant/marrere cap amunt tres vegades seguides, i després premeu-lo cap avall tres vegades seguides per entrar al menú de paràmetres;
Surt del menú del paràmetre: Gireu el botó d'ajust de velocitat, seleccioneu desar o no desar, i premeu el botó d'activació per confirmar;
Corrent nominal: El valor màxim del corrent del motor principal, unitat Ampere;
Paràmetres d'ajust de velocitat: Paràmetres de control de tall automàtic, no pagar 800, unitat mil·li segon,està prohibida la modificació;
Paràmetre de desacceleració: Quan el valor del canvi de corrent de tall supera aquest valor, comença una ràpida desacceleració, unitat Ampere;
Acceleració A1: Quan el corrent de tall és inferior al corrent de tall establert, el valor de velocitat augmentat per cada acceleració del motor que camina;
Desacceleració A2: Quan el corrent de tall és superior al corrent de tall establert, el valor de velocitat reduït per cada desacceleració del motor que camina;
Corrent de braç oscil·lant: Valor per defecte, està prohibida la modificació;
Atura el temps: Després de l'aturada de sobrecàrrega actual en mode automàtic, el corrent es tornarà a detectar després d'un període de temps. Si és inferior al corrent establert, el motor de marxa s'engegarà automàticament; segona unitat, valor per defecte, està prohibida la modificació;
Corrent màxim: El rang de corrent de retroalimentació del motor principal, unitat Ampere;
Host màxim: Interval de visualització d'ajust de velocitat del motor principal del control remot;
Caminada màxima: El paràmetre no és vàlid;
Desplaçament del límit de velocitat: Durant el tall automàtic, el control remot mostra el límit de velocitat del motor a peu = 50% d'aquest paràmetre;
Augmentar la sensibilitat: Quan augmenta el corrent de retroalimentació del motor principal, cada cop que l'augment superi aquest valor, el motor que camina accelera;
Disminuir la sensibilitat: Quan el corrent de retroalimentació del motor principal disminueix, i cada cop que el valor decreixent supera aquest valor, el motor que camina desaccelera;
Compensació de sensibilitat: Sumeu i resteu l'increment de compensació del paràmetre de sensibilitat;
Establir corrent: Tall automàtic, el llindar del corrent de retroalimentació del motor principal. Si se supera aquest valor,el motor que camina comença a desaccelerar;Per sota d'aquest valor, el motor que camina comença a accelerar;unitat: Ampere;
Sortida al ralentí: Quan s'inicia el mode automàtic, si el corrent de retroalimentació del motor principal és inferior a aquest valor,estarà en mode inactiu. Si és superior a aquest valor, sortirà del mode de ralentí i entrarà al mode de tall. La unitat és amperí;
Corrent sense càrrega:Quan s'inicia el mode automàtic, si el corrent de retroalimentació del motor principal és inferior a aquest valor,està en mode sense càrrega. Si és superior a aquest valor, sortirà del mode sense càrrega i entrarà al mode de tall. La unitat és Ampere;
Velocitat del braç oscil·lant: Velocitat inicial del motor del braç basculant a l'arrencada;
Mode de tall: Canvia entre els modes de serra de fulla i de serra de filferro, i els paràmetres canviaran en conseqüència després del canvi; en mode de serra de fulla, la pantalla del control remot afegeix un motor de braç oscil·lant, mentre està en mode de serra de filferro, no hi ha motor de braç oscil·lant;
Temps de rebot: Quan el corrent de retroalimentació del motor principal supera el corrent d'aturada, el corrent de retroalimentació es detectarà contínuament. El temps de rebot és la durada d'aquesta detecció contínua. Després d'aquest temps, si el corrent del motor principal encara supera el corrent d'aturada, el motor que camina s'aturarà;en cas contrari, el motor que camina s'aturarà. El motor seguirà en marxa;
Atura el corrent: El corrent de retroalimentació del motor principal supera aquest valor, i el motor que camina s'aturarà;La unitat és Ampere;
Offset per defecte: El valor inicial del límit de velocitat del motor que camina quan el comandament a distància està encès = 50% d'aquest valor;
6.Característiques elèctriques de control remot

7.Mida de control remot

El dret d’interpretació final d’aquest producte només pertany a la nostra empresa.