ລາຍລະອຽດ
1. ການແນະນໍາກ່ຽວກັບຜະລິດຕະພັນ
ການຄວບຄຸມໄລຍະໄກສໍາລັບການຕັດອັດຕະໂນມັດຂອງລົດຕິດຕາມເສັ້ນທາງເຊືອກທີ່ເຫັນແມ່ນເຫມາະສົມສໍາລັບການຕິດຕາມເຊືອກ
ເຄື່ອງຕັດ. ມັນໃຊ້ 485 ອະນຸສັນຍາ Modbus RTU ເພື່ອຄວບຄຸມຄວາມຖີ່ຂອງການຕິດຕາມຊ້າຍແລະຂວາ
ແປງ, ພ້ອມທັງຄວາມຖີ່ຂອງການປ່ຽນແປງຄວາມຖີ່ຂອງການຄວບຄຸມຄວາມຖີ່ຂອງການເລີ່ມຕົ້ນແລະດ້ານຫນ້າ, ຂໍ້ຫລັງ,
ຜູ້ຄວບຄຸມທິດທາງຊ້າຍແລະຂວາ. ແລະມັນສາມາດອ່ານຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດໃຫຍ່
ຕົວປ່ຽນຜ່ານ 485 ອະນຸສັນຍາ Modbus RTU. ໂດຍການວິເຄາະແລະປຽບທຽບປະຈຸບັນຂອງ
ລົດຍົນ, ຄວາມໄວຂອງການຕິດຕາມເບື້ອງຊ້າຍແລະຂວາສາມາດປັບໂດຍອັດຕະໂນມັດໃນເວລາຈິງ
ບັນລຸການຕັດແບບຕັດອັດຕະໂນມັດ.
2. ລັກສະນະທີ່ເປັນປະໂຫຍດຂອງຜະລິດຕະພັນ
1. ການຮັບຮອງເອົາເຕັກໂນໂລຊີການສື່ສານໄຮ້ສາຍ 433MHz, ກັບໄລຍະການດໍາເນີນການໄຮ້ສາຍຂອງ 100 ປະມານ.
2. ຮັບຮອງເອົາຟັງຊັນທີ່ມີຄວາມຖີ່ອັດຕະໂນມັດແລະການນໍາໃຊ້ 32 ຊຸດຄວບຄຸມໄລຍະໄກໄຮ້ສາຍ
ພ້ອມໆກັນ, ໂດຍບໍ່ມີຜົນກະທົບຕໍ່ກັນແລະກັນ.
3. ສະຫນັບສະຫນູນການປ່ຽນແປງຄວາມຖີ່ທັງຫມົດທີ່ມີ 485 ອະນຸສັນຍາ Modbus RTU, ແລະຄວາມຖີ່ທີ່ເຂົ້າກັນໄດ້ໃນປະຈຸບັນ
ຍີ່ຫໍ້ converter ປະກອບມີ:ຊຽງໄຮ, ປະເທດ Fuji, ຮຸຍຊວນ, zhongchen, ວິກແຫ, ແລະ . ສໍາລັບຍີ່ຫໍ້
ທີ່ບໍ່ເຂົ້າກັນໄດ້, ກະລຸນາຕິດຕໍ່ພວກເຮົາສໍາລັບການປັບແຕ່ງ.
4. ສະຫນັບສະຫນູນລະບຽບການຄວາມໄວ, ດາ, ແລະການອ່ານໃນປະຈຸບັນປ່ຽນແປງຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດໃຫຍ່.
5. ສະຫນັບສະຫນູນການກົດລະບຽບຄວາມຖີ່ຂອງຄວາມຖີ່ຂອງຄວາມຖີ່, ດາ, ແນວຫນ້າ, ກັບຄືນໄປບ່ອນ, ການຄວບຄຸມຊ້າຍແລະຂວາ.
6. ສະຫນັບສະຫນູນການແກ້ໄຂເສັ້ນທາງຂອງເສັ້ນທາງດ້ານຊ້າຍແລະຂວາຕິດຕາມຄວາມຖີ່ໃນການຍ່າງເພື່ອຮັກສາເຄື່ອງຈັກຍ່າງໃນກ
ເສັ້ນກົງ.
7. ສະຫນັບສະຫນູນການທໍາງານການຕັດອັດຕະໂນມັດຂອງ saw ເຊືອກ, ປັບຄວາມໄວຕິດຕາມຊ້າຍແລະຂວາໂດຍອັດຕະໂນມັດໃນ
ເວລາທີ່ແທ້ຈິງອີງຕາມຂໍ້ມູນປະຈຸບັນຂອງມໍເຕີຂະຫນາດໃຫຍ່.
8. ມັນຍັງເຫມາະສົມກັບການຄວບຄຸມຜົນຜະລິດ IO ໂດຍກົງສໍາລັບການເລີ່ມຕົ້ນແລະຢຸດ motor, ແລະຜົນຜະລິດແຮງດັນ analog
ການຄວບຄຸມຄວາມໄວ motor.
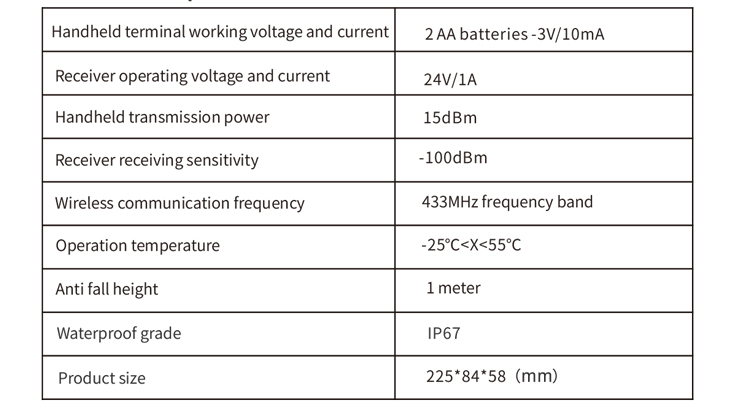
3. ຂໍ້ມູນສະເພາະຂອງຜະລິດຕະພັນ
4. ການແນະນໍາການທໍາງານຂອງຜະລິດຕະພັນ
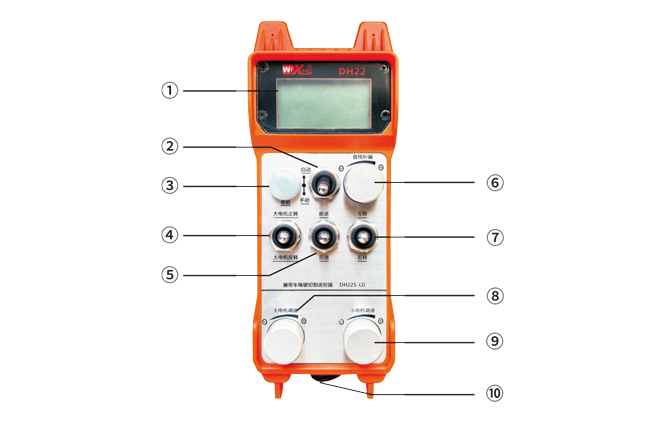
ບັນທຶກ:
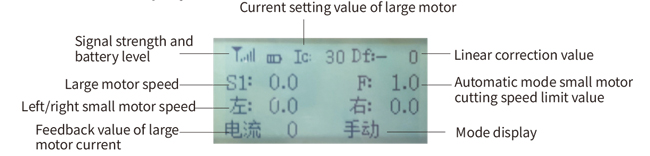
ສະແດງ asscreen:
②Mode Switch:
③ເປີດໃຊ້:
ປຸ່ມປະສົມ, ບາງການປະຕິບັດງານຮຽກຮ້ອງໃຫ້ກົດປຸ່ມ Enable ສໍາລັບການປະຕິບັດງານ,ເບິ່ງຄໍາແນະນໍາສໍາລັບແຕ່ລະສະຫຼັບສໍາລັບລາຍລະອຽດ.
④④④rge④Lalingເຄື່ອງຈັກປ່ຽນ:
ການໃຊ້ສະຫຼັບສະຫຼັບຄວາມໄວ 3 ຢ່າງ, ການດຶງສະຫຼັບນີ້ສາມາດຄວບຄຸມການຫມູນວຽນໄປຂ້າງຫນ້າແລະການຫມູນວຽນຂອງມໍເຕີຂະຫນາດໃຫຍ່. ຫລັງຈາກປ່ອຍມັນ, ລັດຈະຍັງຄົງຢູ່, ແລະມັນຈະມີການສະແດງທີ່ສອດຄ້ອງກັນໃນຫນ້າຈໍ. s1 ↑ brow ຊີ້ບອກເຖິງການຫມູນວຽນ, ແລະລູກສອນ s1 ↓ບົ່ງບອກເຖິງການຫມູນວຽນຂອງ Evene.
⑤small motor forward / Reverse Switch:
ມໍເຕີຂະຫນາດນ້ອຍແມ່ນມີເຄື່ອງຫມາຍລັອກຕົວເອງທີ່ມີຄວາມໄວ 3 ຢ່າງຢູ່ທາງຫນ້າຂອງມັນ. ກົດປຸ່ມ Enable ແລະດຶງສະຫຼັບນີ້ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອກ້າວໄປຂ້າງຫນ້າແລະຖອຍຫລັງ, ແລະຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະປາກົດຢູ່ຫນ້າຈໍ.The↑↑ arrow ເປັນຕົວແທນ, ແລະລູກສອນ↓↓ສະແດງເຖິງດ້ານຫລັງ.
⑥ການແກ້ໄຂເສັ້ນຊື່:
ການນໍາໃຊ້ຫຼາຍ posti purveter shob, ກົດປຸ່ມ Enable, ປ່ຽນ knob ທີ່ຖືກຕ້ອງ, ແລະສະແດງການແກ້ໄຂເສັ້ນຊື່: ແກງ: ຕູດລ້ຽວຊ້າຍທີ່ເພີ່ມຂື້ນ 1 ຫນ່ວຍບໍລິການຕໍ່ການຫມູນວຽນ, ແລະເບື້ອງຊ້າຍ
ຄວາມໄວຂອງມໍເຕີເພີ່ມຂື້ນໂດຍ 0.1 ຫນ່ວຍງານ; ລ້ຽວຊ້າຍຊ້າຍ, ຈໍສະແດງຜົນແກ້ໄຂເສັ້ນຊື່: ແກງ: ຢູ່ເບື້ອງຂວາ, ທຸກໆຄັ້ງຂອງຕູດເພີ່ມຂື້ນໂດຍ 1 ຫນ່ວຍງານ, ແລະຄວາມໄວຂອງມໍເຕີທີ່ຖືກຕ້ອງເພີ່ມຂື້ນ
ໂດຍ 0.1 ຫນ່ວຍງານ.
⑦small motor ປ່ຽນແປງ:
ການໃຊ້ສະຫຼັບສະຫຼັບຄວາມໄວ 3 ຢ່າງ, ເມື່ອເຮັດວຽກດ້ວຍຕົນເອງ, ມໍເຕີຂະຫນາດນ້ອຍສາມາດຄວບຄຸມໄດ້ເພື່ອລ້ຽວຊ້າຍຫລືຂວາ. ເມື່ອຖືກປ່ອຍຕົວ, ການຄວບຄຸມໄລຍະໄກຈະຢຸດການປະຕິບັດນີ້ໂດຍອັດຕະໂນມັດ. ຢູ່ໃນລັດຕໍ່ລັດ, ໃນເວລາທີ່ສະຫຼັບນີ້ຫັນໄປ, ຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະປາກົດຢູ່ຫນ້າຈໍ. arch ←←↑↑ arrow ຊີ້ບອກລ້ຽວຊ້າຍ, ແລະ the ↑ el arrows ບົ່ງບອກເຖິງ right urnect.when ໃນແບບປີ້ນກັບກັນ, ເປີດສະຫຼັບນີ້ແລະຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະປາກົດຢູ່ຫນ້າຈໍ. ລູກສອນ ←↓ ຊີ້ບອກລ້ຽວຊ້າຍ, ແລະ ↓ → ລູກສອນຊີ້ບອກລ້ຽວຂວາ.
⑧ລະບຽບການຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່:
ການນໍາໃຊ້ຫຼາຍ posti purveter shob, ໝຸນ 1 ຕາຂ່າຍໄຟຟ້າຕາຕະລາງແຕ່ລະຄັ້ງ, ມູນຄ່າຄວາມໄວຂອງການປ່ຽນແປງມໍເຕີຂະຫນາດໃຫຍ່ໂດຍປະມານ 0.2 ຫົວຫນ່ວຍ. ການຫມຸນໄວສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ໄດ້ໄວ.
⑨ ລະບຽບການຄວາມໄວ motor ຂະຫນາດນ້ອຍ:
ການນໍາໃຊ້ຫຼາຍ posti purveter shob, ໃນຮູບແບບຄູ່ມື, ກົດປຸ່ມເປີດໃຊ້ງານແລະຫຼັງຈາກນັ້ນ rotate ຕາຂ່າຍໄຟຟ້າຫນຶ່ງໃນເວລາ,ຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍຊ້າຍແລະຂວາມີການປ່ຽນແປງປະມານ 0.1 ຫົວຫນ່ວຍ, ແລະການຫມູນວຽນໄວສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງ motor ຂະຫນາດນ້ອຍຢ່າງໄວວາ. ໃນໂຫມດອັດຕະໂນມັດ, ກົດປຸ່ມເປີດໃຊ້ງານແລະ rotate ຕາຂ່າຍໄຟຟ້າຫນຶ່ງໃນເວລາ,ຄ່າຈໍາກັດຄວາມໄວ F ຂອງມໍເຕີຂະຫນາດນ້ອຍມີການປ່ຽນແປງປະມານ 0.1 ຫົວຫນ່ວຍ. ການຫມູນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຈໍາກັດຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ.
⑩ ສະຫຼັບພະລັງງານຄວບຄຸມໄລຍະໄກ
ຫນ້າຈໍຈໍສະແດງຜົນດ້ານການຄວບຄຸມໄລຍະໄກໄດ້ຖືກເປີດໃຊ້.
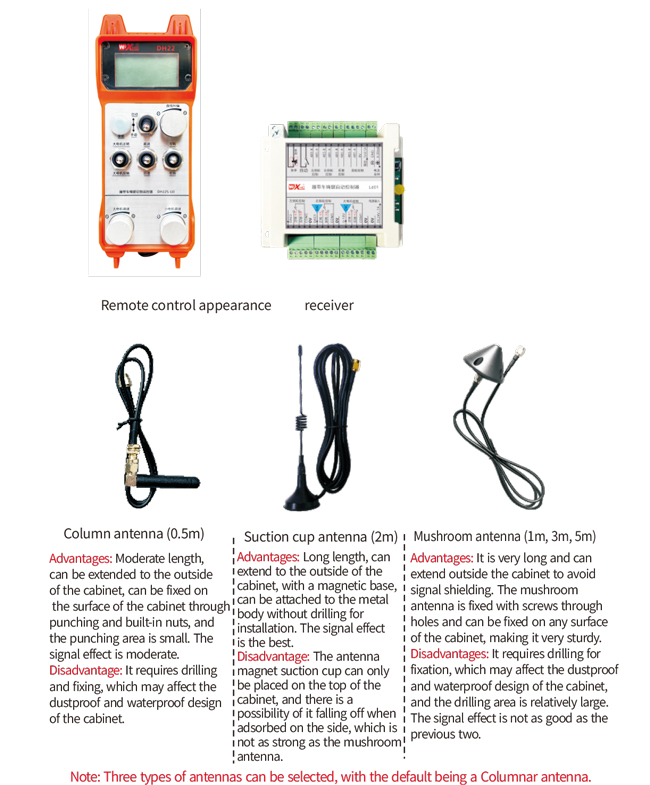
5. ແຜນວາດອຸປະກອນເສີມຜະລິດຕະພັນ
6. ຄູ່ມືການຕິດຕັ້ງຜະລິດຕະພັນ
6.1 ຂັ້ນຕອນການຕິດຕັ້ງຜະລິດຕະພັນ
1. ຕິດຕັ້ງເຄື່ອງຮັບເຂົ້າໄປໃນຕູ້ໄຟຟ້າຜ່ານ buckle ຢູ່ດ້ານຫລັງ, ຫຼືຕິດຕັ້ງມັນເຂົ້າໄປໃນຕູ້ຜ່ານຮູ screw ຢູ່ສີ່ແຈຂອງເຄື່ອງຮັບ.
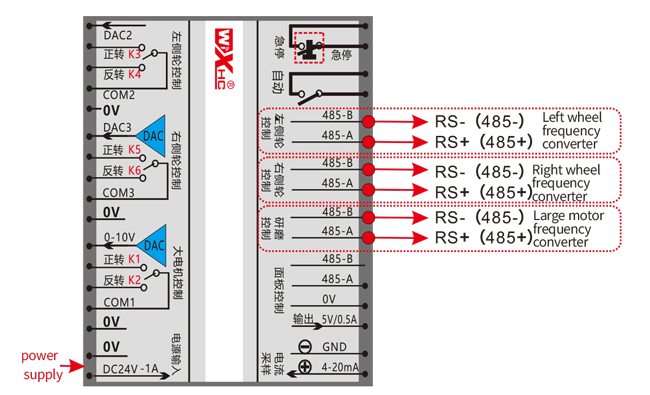
2. ອ້າງເຖິງແຜນວາດສາຍໄຟຂອງພວກເຮົາແລະປຽບທຽບກັບອຸປະກອນທີ່ຢູ່ໃນສະຖານທີ່ຂອງທ່ານ. ເຊື່ອມຕໍ່ອຸປະກອນກັບເຄື່ອງຮັບຜ່ານສາຍ.
3. ຫຼັງຈາກແກ້ໄຂຜູ້ຮັບ, ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະເຊື່ອມຕໍ່ເສົາອາກາດທີ່ມີເຄື່ອງຮັບແລະຕິດຕັ້ງຫຼືວາງປາຍສາຍອາກາດພາຍນອກຂອງຕູ້ໄຟຟ້າ.. ມັນໄດ້ຖືກແນະນໍາໃຫ້ວາງມັນຢູ່ເທິງສຸດຂອງຕູ້ໄຟຟ້າສໍາລັບຜົນກະທົບທີ່ດີທີ່ສຸດ. ຫ້າມບໍ່ໃຫ້ສາຍອາກາດບໍ່ເຊື່ອມຕໍ່ ຫຼືວາງໄວ້ພາຍໃນຕູ້ໄຟຟ້າ, ເນື່ອງຈາກວ່າມັນອາດຈະເຮັດໃຫ້ສັນຍານບໍ່ສາມາດໃຊ້ໄດ້.
4. ທີ່ສຸດ, ຕິດຕັ້ງຫມໍ້ໄຟໃນການຄວບຄຸມໄລຍະໄກ, ແຫນ້ນຝາປິດແບດເຕີລີ່, ແລະເປີດໄຟຟ້າຂອງການຄວບຄຸມໄລຍະໄກ. ຫຼັງຈາກຫນ້າຈໍຈໍສະແດງຜົນດ້ານການຄວບຄຸມໄລຍະໄກສະແດງໃຫ້ເຫັນເປັນປົກກະຕິ
ການໂຕ້ຕອບການເຮັດວຽກ, ການຄວບຄຸມໄລຍະໄກສາມາດປະຕິບັດໄດ້.
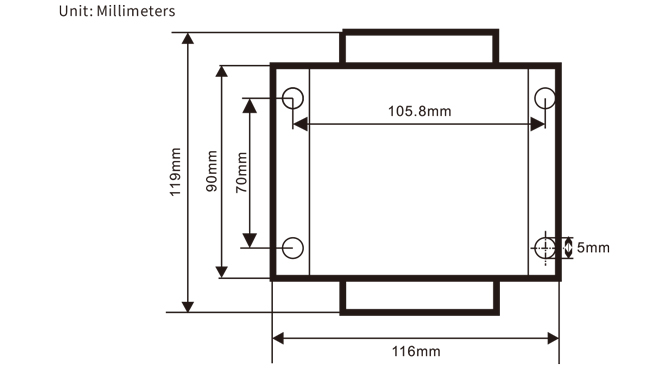
6.2 ຂະຫນາດການຕິດຕັ້ງຮັບ
6.3 ແຜນວາດສາຍໄຟສາຍ
7. ຄໍາແນະນໍາກ່ຽວກັບການປະຕິບັດງານຜະລິດຕະພັນ
7.1 ການຕັ້ງຄ່າພາລາມິເຕີຄວບຄຸມຫ່າງໄກສອກຫຼີກ
ວິທີການທີ່ຈະເຂົ້າໄປໃນຕົວກໍານົດການຄວບຄຸມ backend ທີ່ຫ່າງໄກສອກຫຼີກ:
ປ່ຽນໂຫມດປ່ຽນເປັນຮູບແບບຄູ່ມື, ປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ 25 ທັງສອງຂ້າງ, ຫຼື 0, 10, 20, 40, 50 ໃນທຸກດ້ານ, ແລະຫັນຫນ້າໄປທາງຫນ້າຂອງມໍເຕີຂະຫນາດໃຫຍ່ 3 ເວລາແລະລົງ 3 ເວລາ;
ໃຊ້ “ການຄວບຄຸມຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ” Knob To Flip Pages, ກົດປຸ່ມ Enable, ແລະຫຼັງຈາກນັ້ນປ່ຽນ Knob ຄວບຄຸມຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍເພື່ອແກ້ໄຂພາລາມິເຕີ. ຫຼັງຈາກດັດແກ້, ປ່ຽນຫນ້າເວັບໃຫ້ສິ້ນສຸດລົງ,ເລືອກ “ປະຢັດ” ອອກຈາກ, ແລະກົດປຸ່ມ Enable ເພື່ອອອກຈາກເມນູ;
ຕົວກໍານົດການແມ່ນມີດັ່ງຕໍ່ໄປນີ້:
ກະແສສູງສຸດ: ລະດັບຄໍາຕິຊົມຂອງກະແສມໍເຕີຂະຫນາດໃຫຍ່, ຕັ້ງລະດັບ 15-200a, ໃນຕອນຕົ້ນ 100;
ຕົວກໍານົດການຄວບຄຸມຄວາມໄວ: ແບບອັດຕະໂນມັດ, ມໍເຕີຂະຫນາດນ້ອຍເລັ່ງໄວຫຼືຊ້າລົງ,ຂະຫນາດນ້ອຍກວ່າໄວກວ່າເກົ່າ, ກໍານົດ 200-1500, ໃນຕອນຕົ້ນ 800;
ພາລາມິເຕີ Decelation: ກໍານົດຂີດຈໍາກັດດ້ານເທິງທີ່ອະນຸຍາດໃຫ້ມີຄວາມໄວໃນການປ່ຽນແປງ. ໃນເວລາທີ່ການປ່ຽນແປງໃນປະຈຸບັນທີ່ເກີນມູນຄ່ານີ້, ການ decelation ຈະເກີດຂື້ນ. ຂະຫນາດນ້ອຍກວ່າ, ການ deceleeration ໄວກວ່າຂອງ motors ຊ້າຍແລະຂວາ, ມີລະດັບຂອງ 05-12 ແລະໃນຕອນຕົ້ນຂອງ 06;
ການເລັ່ງ A1: ຄວາມໄວມໍເຕີຂະຫນາດໃຫຍ່, ມັນເພີ່ມຂື້ນໄວເທົ່າໃດ, ມີລະດັບຂອງ 00-06 ແລະໃນຕອນຕົ້ນຂອງ 01;
deceleration A2: ຄວາມໄວມໍເຕີຂະຫນາດໃຫຍ່, ມັນຫຼຸດລົງໄວຂື້ນ, ມີລະດັບຂອງ 00-06 ແລະໃນຕອນຕົ້ນຂອງ 02;
ເປີດໃຊ້ກົດລະບຽບຄວາມໄວ: ບໍ່ຈໍາເປັນຕ້ອງມີຄວາມໄວສູງທີ່ຕ້ອງໄດ້ຮັບການເປີດໃຊ້ງານ? 00 ບໍ່ສາມາດເຮັດໃຫ້ໄດ້, 01 ເຮັດໃຫ້, ຄ່າເລີ່ມຕົ້ນແມ່ນ 01;
ເລີ່ມຕົ້ນລັອກຕົວເອງ: ມໍເຕີຂະຫນາດໃຫຍ່ຮັກສາຕົວເອງໂດຍອັດຕະໂນມັດ? 00 ບໍ່ຖື, 01 ຢຸບ, ໃນຕອນຕົ້ນ 01
ການຍ່າງສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຊ້າຍແລະຂວາ, ກ້ອບ 10-100, ໃນຕອນຕົ້ນ 50;
ການຕັດກະແສ: ການຕັດສູງສຸດໃນປະຈຸບັນ, ສະແດງຢູ່ຫນ້າຈໍເປັນຄຸນຄ່າຂອງ IC, ກ້ອບ 15-160, ໃນຕອນຕົ້ນ 30,
ກົງກັບ ic: 30 ສະແດງຢູ່ຫນ້າຈໍ. ຂອບເຂດຈໍາກັດເທິງຂອງພາລາມິເຕີນີ້ແມ່ນ 80% ຂອງປະຈຸບັນສູງສຸດ;
ຂີດຈໍາກັດຄວາມໄວໃນຕອນຕົ້ນ: ມໍເຕີຂະຫນາດນ້ອຍເລີ່ມຕົ້ນຄວາມໄວການຕັດອັດຕະໂນມັດໃນເວລາທີ່ເປີດຢູ່ໃນຂອບເຂດຂອງ 0-100, ກັບຄ່າເລີ່ມຕົ້ນຂອງ 10. ໜ້າຈໍສະແດງຜົນ F1.0, ແລະພາລາມິເຕີນີ້ແມ່ນຖືກຕ້ອງພຽງແຕ່ເມື່ອຕັ້ງເວລາຍ່າງສູງສຸດ 50.
ແບບອັດຕະໂນມັດ: ຕັ້ງເປັນ 00, ສະຫຼັບອັດຕະໂນມັດ/ຄູ່ມືແມ່ນສະຫຼັບໂໝດ. ຕັ້ງເປັນ 01, ສະວິດອັດຕະໂນມັດ/ຄູ່ມືແມ່ນຕັ້ງເປັນຕຳແໜ່ງອັດຕະໂນມັດ, ຈໍສະແດງຜົນສະແດງໃຫ້ເຫັນແສງສະຫວ່າງ, ແລະຜົນຜະລິດ terminal ອັດຕະໂນມັດຢູ່ໃນເຄື່ອງຮັບຖືກປິດ. ເມື່ອຕັ້ງເປັນຄູ່ມື, terminal ຜົນຜະລິດອັດຕະໂນມັດໄດ້ຖືກຕັດການເຊື່ອມຕໍ່;
ການບ່ຽງເບນການຈຳກັດຄວາມໄວ: ຂອບເຂດຈໍາກັດເທິງຂອງຄວາມໄວຕັດອັດຕະໂນມັດຂອງມໍເຕີຂະຫນາດນ້ອຍຕັ້ງແຕ່ 00 ເພື່ອ 200, ກັບຄ່າເລີ່ມຕົ້ນຂອງ 60 ແລະການສະແດງທີ່ສອດຄ້ອງກັນຂອງ 6.0 ໃນຫນ້າຈໍ; ຂີດຈຳກັດເທິງຂອງມູນຄ່າການສະແດງຜົນ = ຈຳກັດຄວາມໄວຊົດເຊີຍ x 0.1;
ເຈົ້າພາບສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດໃຫຍ່, ກ້ອບ 10-100, ໃນຕອນຕົ້ນ 50;
ອຸປະກອນ Mbus (ຈໍາເປັນ): ການຄັດເລືອກແບບຈໍາລອງຕົວແບບຄວາມຖີ່ຂອງມໍເຕີທີ່ມີຂະຫນາດໃຫຍ່, ກ້ອບ 00-03, ໃນຕອນຕົ້ນ 03;
00- Shanghai Xielin 01-Fuji
02-Invt 03 inoveance (Zhongchen, Robicon)
ອຸປະກອນ SBUS (ຈໍາເປັນ): ການຄັດເລືອກຮູບແບບເຄື່ອງປ່ຽນຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດນ້ອຍ, ກ້ອບ 00-05, ໃນຕອນຕົ້ນ 03;
00- Shanghai Xielin 01-Fuji
02-Invt 03 inoveance (Zhongchen, Robicon)
04-anchuanda 05- ບໍ່ມີ
7.2 ການຕັ້ງຄ່າພາລາມິເຕີຂອງຄວາມຖີ່ຂອງຄວາມຖີ່
1. ການຄັດເລືອກແຫຼ່ງຂໍ້ມູນຄໍາສັ່ງ: ຊ່ອງທາງການສື່ສານ
2. ການຄັດເລືອກແຫຼ່ງຄວາມຖີ່ຕົ້ນຕໍ: ການສື່ສານທີ່ມອບໃຫ້
3. ອັດຕາ Baud: 19200
4. ຮູບແບບຂໍ້ມູນ: ບໍ່ມີການຢັ້ງຢືນ, ຮູບແບບຂໍ້ມູນ<8-n-1>
5. ທີ່ຢູ່ທ້ອງຖິ່ນ: ກໍານົດແປງຄວາມຖີ່ຂອງຄວາມຖີ່ຂອງຊ້າຍ 1, ເຄື່ອງປ່ຽນຄວາມຖີ່ທີ່ຖືກຕ້ອງ 2, ແລະ
ເຄື່ອງປ່ຽນຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດໃຫຍ່ 3
7.3 ຄໍາແນະນໍາໃນການຄວບຄຸມໄລຍະໄກ
1. ພະລັງງານຢູ່ໃນເຄື່ອງ, ເປີດການຄວບຄຸມໄລຍະໄກ, ກະລຸນາໃສ່ backend ຄວບຄຸມໄລຍະໄກ, ຕັ້ງຄ່າ
ຕົວກໍານົດການຄວບຄຸມ backend ໄລຍະໄກ, ສ່ວນໃຫຍ່ແມ່ນການຕັ້ງມໍເຕີຂະຫນາດນ້ອຍແລະຂະຫນາດໃຫຍ່
ແບບທີ່ປ່ຽນແປງ: (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງໄດ້ກໍານົດໄວ້ແລ້ວ);
2. ກໍານົດພາລາມິເຕີຂອງຕົວປ່ຽນຄວາມຖີ່ (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງ
ໄດ້ກໍານົດມັນແລ້ວ);
3. ກໍານົດການຄວບຄຸມໄລຍະໄກໃຫ້ເປັນຮູບແບບຄູ່ມື, ແລະຫຼັງຈາກນັ້ນໃຊ້ການຄວບຄຸມໄລຍະໄກເພື່ອຍ້າຍເຄື່ອງໄປ
ຕໍາແຫນ່ງທີ່ເຮັດວຽກ;
4. ໃນຮູບແບບຄູ່ມື, ຕັ້ງກະແສໄຟຟ້າຂະຫນາດໃຫຍ່ຈົນເຖິງ IC ແລະຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່
5. ປ່ຽນເປັນແບບອັດຕະໂນມັດແລະກໍານົດການຕັດຄວາມໄວຂອງຄວາມໄວ FE FE ມູນຄ່າສໍາລັບມໍເຕີຂະຫນາດນ້ອຍ;
6. ໃນຮູບແບບອັດຕະໂນມັດ, ປ່ຽນເຄື່ອງມືປ່ຽນຂະຫນາດໃຫຍ່ເພື່ອເລີ່ມຕົ້ນການຜະລິດມໍເຕີຂະຫນາດໃຫຍ່, ຫຼັງຈາກນັ້ນຫັນ
ເຄື່ອງຈັກຜະລິດລົດນ້ອຍໄປສົ່ງຕໍ່ຫຼືປີ້ນກັບກັນ, ແລະການຄວບຄຸມໄລຍະໄກເຂົ້າໄປໃນການຕັດອັດຕະໂນມັດ
ຮູບແບບເພື່ອເລີ່ມຕົ້ນການຕັດ.
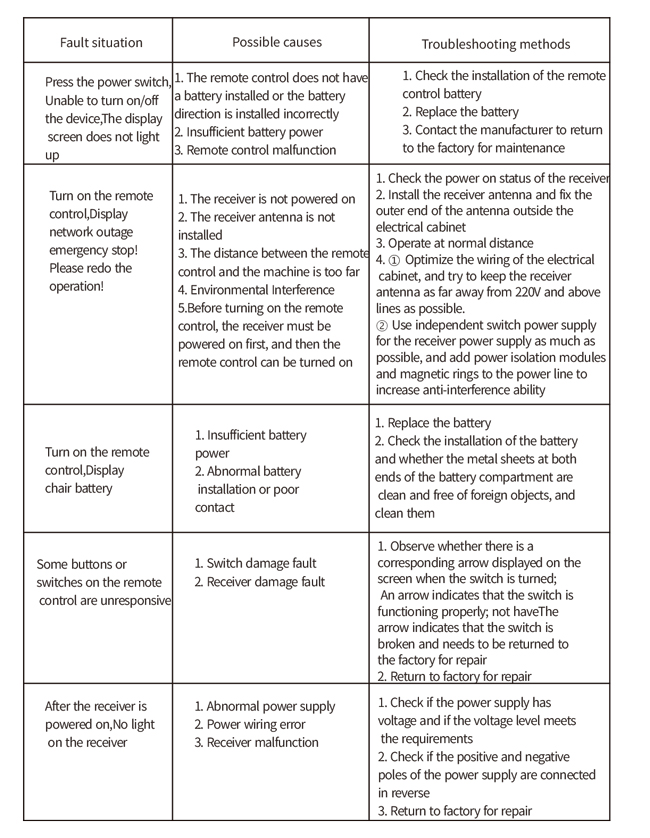
8.ການແກ້ໄຂບັນຫາຜະລິດຕະພັນ
9.ການບໍາລຸງຮັກສາ
1. ກະລຸນາໃຊ້ມັນໃນສະພາບແວດລ້ອມແຫ້ງໃນອຸນຫະພູມໃນຫ້ອງແລະຄວາມກົດດັນເພື່ອຂະຫຍາຍຊີວິດການບໍລິການຂອງຕົນ.
2. ກະລຸນາຫລີກລ້ຽງການໃຊ້ໃນສະພາບແວດລ້ອມທີ່ຜິດປົກກະຕິເຊັ່ນ: ຝົນແລະຟອງນ້ໍາເພື່ອໃຫ້ອາຍຸການບໍລິການ.
3. ກະລຸນາຮັກສາຫ້ອງປະກອບແບັດເຕີຣີແລະບໍລິເວນໂລຫະທີ່ສະອາດ.
4. ກະລຸນາຫຼີກລ່ຽງການທໍາລາຍການຄວບຄຸມໄລຍະໄກເນື່ອງຈາກບີບແລະຫຼຸດລົງ.
5. ຖ້າບໍ່ໃຊ້ເປັນເວລາດົນນານ, ກະລຸນາຖອດແບັດເຕີຣີອອກແລະເກັບຮັກສາການຄວບຄຸມໄລຍະໄກແລະແບດເຕີລີ່ໃນສະອາດ
ແລະສະຖານທີ່ທີ່ປອດໄພ.
6.ໃນລະຫວ່າງການເກັບຮັກສາແລະການຂົນສົ່ງ, ຄວນເອົາໃຈໃສ່ຄວນຈ່າຍໃຫ້ກັບຄວາມຊຸ່ມຊື່ນແລະຄວາມຕ້ານທານຊ shock ອກ.
10. ຂໍ້ມູນຄວາມປອດໄພ
1. ກະລຸນາອ່ານຄໍາແນະນໍາຢ່າງລະມັດລະວັງກ່ອນທີ່ຈະໃຊ້ແລະຫ້າມຜູ້ຊ່ຽວຊານຈາກການປະຕິບັດງານ.
2. ກະລຸນາປ່ຽນຫມໍ້ໄຟໃຫ້ທັນເວລາເມື່ອແບັດເຕີຣີຕ່ໍາເກີນໄປເພື່ອຫລີກລ້ຽງຄວາມຜິດພາດທີ່ເກີດຈາກ
ພະລັງງານບໍ່ພຽງພໍ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດການຄວບຄຸມໄລຍະໄກແມ່ນບໍ່ສາມາດປະຕິບັດງານໄດ້.
3. ຖ້າຕ້ອງການສ້ອມແປງ, ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດ. ຖ້າຄວາມເສຍຫາຍແມ່ນເກີດມາຈາກການສ້ອມແປງຕົວເອງ, ຜູ້ຜະລິດ
ຈະບໍ່ໃຫ້ການຮັບປະກັນ.






