ລາຍລະອຽດ
1. ການແນະນໍາກ່ຽວກັບຜະລິດຕະພັນ
ສາຍເຊືອກທີ່ກວ້າງຂວາງໄດ້ເຫັນການຄວບຄຸມອັດຕະໂນມັດທີ່ຕັດໂດຍອັດຕະໂນມັດ. ມັນຮັບຮອງເອົາພິທີການ 485modBusRTU ເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນແລະດ້ານຫນ້າເບື້ອງຊ້າຍແລະຂວາແລະຂວາຂອງການຄວບຄຸມດ້ານຊ້າຍແລະຂວາຂອງຜູ້ລ້ຽງ, ພ້ອມທັງການປ່ຽນແປງຄວາມຖີ່ຂອງການປ່ຽນແປງຄວາມຖີ່ຂອງການຄວບຄຸມ RTU ເພື່ອຄວບຄຸມຄວາມໄວເລີ່ມຕົ້ນແລະທາງຫນ້າເບື້ອງຊ້າຍແລະທາງຫລັງຄວບຄຸມດ້ານຊ້າຍແລະຂວາຂອງຕົວປ່ຽນແຂນເບື້ອງຊ້າຍແລະຂວາ, ແລະຄວາມຖີ່ຂອງການປ່ຽນແປງຄວາມຖີ່ຂອງການວິເຄາະໃນປະຈຸບັນແລະການປຽບທຽບ, ປັບຄວາມໄວຂອງຕົວກວາດເບື້ອງຊ້າຍແລະຂວາໃນເວລາຈິງເພື່ອບັນລຸການຕັດແບບຕັດອັດຕະໂນມັດ.
2. ຄຸນນະສົມບັດຜະລິດຕະພັນ
1. ຮັບຮອງເອົາເຕັກໂນໂລຢີການສື່ສານໄຮ້ສາຍ 43MHZ, ໄລຍະທາງການປະຕິບັດງານໄຮ້ສາຍແມ່ນ 100 ປະມານ.
2. ຮັບຮອງເອົາຟັງຊັນຄວາມຖີ່ຂອງອັດຕະໂນມັດ, ໃຊ້ 32 ຊຸດຂອງຜູ້ຄວບຄຸມໄລຍະໄກແບບໄຮ້ສາຍໃນເວລາດຽວກັນ, ໂດຍບໍ່ມີຜົນກະທົບຕໍ່ກັນແລະກັນ.
3. ສະຫນັບສະຫນູນການປ່ຽນແປງທັງຫມົດທີ່ມີໂປໂຕຄອນ Rtu 485-modbus. ຍີ່ຫໍ້ Inverter ທີ່ໄດ້ຮັບການດັດປັບລວມມີ:ຊຽງໄຮ, ປະເທດ Fuji, ປະດິດສ້າງ, zhongchen, ວິກແຫ, ແວນຕຸ້ງ. ຖ້າຍີ່ຫໍ້ບໍ່ແມ່ນ ADA ກະລຸນາຕິດຕໍ່ຫາພວກເຮົາເພື່ອປັບແຕ່ງ.
4. ສະຫນັບສະຫນູນການເລີ່ມຕົ້ນລົດຈັກຂະຫນາດໃຫຍ່ເລີ່ມຕົ້ນ, ກົດຄວາມໄວ, ແລະການອ່ານປະຈຸບັນ.
5. ສະຫນັບສະຫນູນລະບຽບການຄວາມໄວຂອງຕົວກວາດເວັບທີ່ມີຄວາມເຂັ້ມແຂງ, ຊູບ, ດ້ານຫນ້າດ້ານຫນ້າແລະດ້ານຊ້າຍແລະຂວາ.
6. ສະຫນັບສະຫນູນການແກ້ໄຂທີ່ມີຄວາມຫມັ້ນຄົງດ້ານຊ້າຍແລະຂວາ.
7. ໃບສະຫນັບສະຫນູນເຊືອກມີຫນ້າທີ່ຕັດອັດຕະໂນມັດ, ປັບຄວາມໄວຂອງຕົວກວາດເບື້ອງຊ້າຍແລະຂວາໂດຍອັດຕະໂນມັດໃນເວລາຈິງໆໄປຕາມຂໍ້ມູນກ່ຽວກັບມໍເຕີຂະຫນາດໃຫຍ່.
8. ໃນເວລາດຽວກັນ, ມັນສາມາດໃຊ້ໄດ້ກັບຜົນຜະລິດ IO ໂດຍກົງເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນແລະຢຸດຂອງມໍເຕີ, ແລະຜົນຜະລິດແຮງດັນທີ່ຄ້າຍຄືກັບການປຽບທຽບເພື່ອຄວບຄຸມຄວາມໄວຂອງມໍເຕີ.
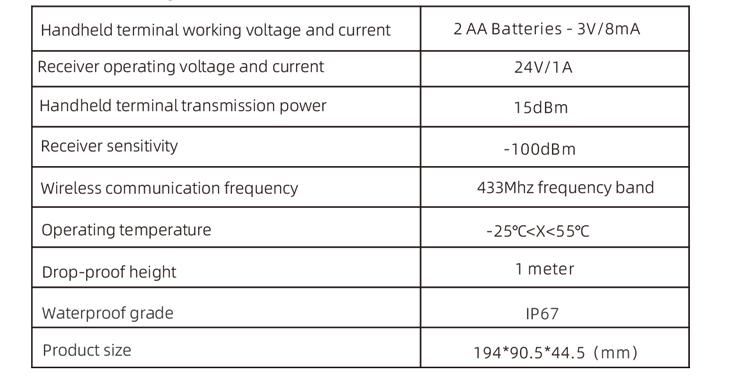
3. ຂໍ້ມູນສະເພາະຂອງຜະລິດຕະພັນ
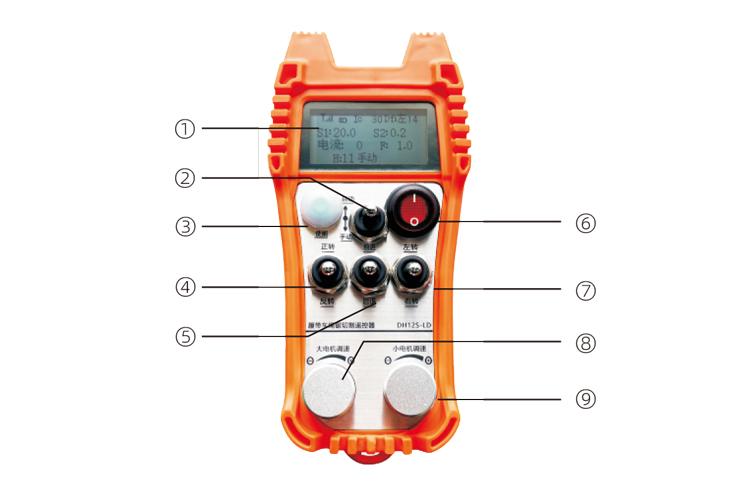
4. ຄໍາແນະນໍາກ່ຽວກັບການຜະລິດຕະພັນສິນຄ້າ
ບັນທຶກ:
ສະແດງ asscreen:

②Mode Switch:
ການໃຊ້ລະດັບ 2 ລະດັບ, ມັນເປັນໄປໄດ້ທີ່ຈະປ່ຽນລະຫວ່າງຮູບແບບອັດຕະໂນມັດແລະຄູ່ມື, ແລະຮູບແບບທີ່ສອດຄ້ອງກັນຈະຖືກສະແດງຢູ່ຫນ້າຈໍສໍາລັບປ່ຽນ.
③ເປີດໃຊ້ງານ:
ປຸ່ມປະສົມ, ບາງການປະຕິບັດງານຮຽກຮ້ອງໃຫ້ກົດປຸ່ມ Enable ສໍາລັບການປະຕິບັດງານ, ກະລຸນາອ້າງອີງໃສ່ຄໍາແນະນໍາສໍາລັບແຕ່ລະສະຫຼັບສໍາລັບລາຍລະອຽດ.
④ປ່ຽນເຄື່ອງຈັກຂະຫນາດໃຫຍ່:
ການໃຊ້ສະຫຼັບສະຫຼັບຄວາມໄວ 3 ຢ່າງ, ການດຶງສະຫຼັບນີ້ສາມາດຄວບຄຸມການຫມູນວຽນໄປຂ້າງຫນ້າແລະການຫມູນວຽນຂອງມໍເຕີຂະຫນາດໃຫຍ່. ຫລັງຈາກປ່ອຍມັນ, ລັດຈະຍັງຄົງຢູ່, ແລະມັນຈະມີການສະແດງທີ່ສອດຄ້ອງກັນໃນຫນ້າຈໍ. ລູກສອນ T ຊີ້ບອກເຖິງການຫມູນວຽນ, ແລະລູກສອນ y ຊີ້ບອກເຖິງການຫມູນວຽນດ້ານກົງກັນຂ້າມ.
⑤small motor forward / Reverse Switch:
ການນໍາໃຊ້ການລັອກຕົວເອງດ້ວຍຕົນເອງ 3-Speed, ການດຶງສະຫຼັບນີ້ສາມາດຄວບຄຸມມໍເຕີຂະຫນາດນ້ອຍເພື່ອກ້າວໄປຂ້າງຫນ້າແລະຖອຍຫລັງ. ຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະສະແດງໃນຫນ້າຈໍ, ດ້ວຍລູກສອນ t ທີ່ສະແດງຢູ່ຂ້າງຫນ້າແລະລູກສອນ↓ຊີ້ບອກຫລັງ.
⑥remoteຄວບຄຸມພະລັງງານໄຟຟ້າ:
ຫນ້າຈໍຈໍສະແດງຜົນດ້ານການຄວບຄຸມໄລຍະໄກໄດ້ຖືກເປີດໃຊ້.
⑦ປ່ຽນເຄື່ອງຈັກປ່ຽນເຄື່ອງນ້ອຍ:
ການໃຊ້ສະຫຼັບສະຫຼັບຄວາມໄວ 3 ຢ່າງ, ເມື່ອເຮັດວຽກດ້ວຍຕົນເອງ, ມໍເຕີຂະຫນາດນ້ອຍສາມາດຄວບຄຸມໄດ້ເພື່ອລ້ຽວຊ້າຍຫລືຂວາ. ເມື່ອຖືກປ່ອຍຕົວ, ການຄວບຄຸມໄລຍະໄກຈະຢຸດການດໍາເນີນການນີ້ໂດຍອັດຕະໂນມັດ. ເມື່ອໃດທີ່ຢູ່ໃນລັດຕໍ່ຫນ້າລັດ, ເປີດສະຫຼັບນີ້ແລະຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະປາກົດຢູ່ຫນ້າຈໍ. + ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ, ແລະ – ລູກສອນສະແດງໃຫ້ເຫັນ twack treworks.when ໃນແບບປີ້ນກັບກັນ, ເປີດສະຫຼັບນີ້ແລະຈໍສະແດງຜົນທີ່ສອດຄ້ອງກັນຈະປາກົດຢູ່ຫນ້າຈໍ. + ລູກສອນຊີ້ບອກລ້ຽວຊ້າຍ, ແລະ – ລູກສອນສະແດງໃຫ້ເຫັນ tw turn.press ແລະກົດປຸ່ມ Enable, ຫຼັງຈາກນັ້ນເປີດສະຫຼັບນີ້ເພື່ອປະຕິບັດການເຮັດວຽກປ່ຽນເປັນສະຖານີ, ເຮັດໃຫ້ໄວກວ່າ.
⑧ລະບຽບການຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່:
ການນໍາໃຊ້ຫຼາຍ posti purveter shob, ຫມຸນຕູດເພື່ອປັບຄວາມໄວຂອງ mot ຂອງມໍເຕີສໍາລັບທຸກໆຄົນ 1 ການຫມູນວຽນຕາຂ່າຍໄຟຟ້າ, ມູນຄ່າຄວາມໄວຂອງການປ່ຽນແປງມໍເຕີຂະຫນາດໃຫຍ່ໂດຍປະມານ 0.2 ຫົວຫນ່ວຍ, ແລະການຫມູນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່ໄດ້ໄວ.
9 ລະບຽບການຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ (ການແກ້ໄຂເສັ້ນ):ການນໍາໃຊ້ knove coster posti, ໃນຮູບແບບຄູ່ມື, ສໍາລັບທຸກໆຄົນ 1 ລ້ຽວຂອງຕູດ, ມູນຄ່າຄວາມໄວຂອງການປ່ຽນແປງມໍເຕີຂະຫນາດນ້ອຍໂດຍປະມານ 0.1 ຫົວຫນ່ວຍ. ການຫມູນວຽນໄວສາມາດດັດແປງມູນຄ່າຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍໄດ້ໄວ.
ໃນຮູບແບບອັດຕະໂນມັດ, ກົດປຸ່ມ Enable ແລະຫມຸນ 1 ຕາຂ່າຍໄຟຟ້າຕາຕະລາງແຕ່ລະຄັ້ງ. ມູນຄ່າຂີດຈໍາກັດຄວາມໄວ f ຂອງການປ່ຽນແປງມໍເຕີຂະຫນາດນ້ອຍໂດຍປະມານ 0.1 ຫົວຫນ່ວຍ. ການຫມູນວຽນຢ່າງໄວວາສາມາດດັດແປງມູນຄ່າຂີດຈໍາກັດຄວາມໄວຂອງເຄື່ອງຈັກຂະຫນາດນ້ອຍ. ປຸ່ມ enable the the the, ປ່ຽນຕູດໄປທາງຂວາ, ແລະຈໍສະແດງຜົນເສັ້ນຊື່ໆສະແດງໃຫ້ເຫັນ d f: ກ່ໍາ. ແຕ່ລະພືດຫມູນວຽນຂອງຕູດເພີ່ມຂື້ນໂດຍ 1 ຫນ່ວຍງານ; ລ້ຽວຊ້າຍຊ້າຍ, ຈໍສະແດງຜົນແກ້ໄຂເສັ້ນຊື່: ແກງ: ຖືກຕ້ອງ. ແຕ່ລະພືດຫມູນວຽນຂອງຕູດເພີ່ມຂື້ນໂດຍ 1 ຫນ່ວຍງານ, ແລະຫນ່ວຍບໍລິການແກ້ໄຂແຕ່ລະຢ່າງເທົ່າກັບການຄວບຄຸມຄວາມໄວຂອງເຄື່ອງຈັກ AVI 0.02 ວິທີ.
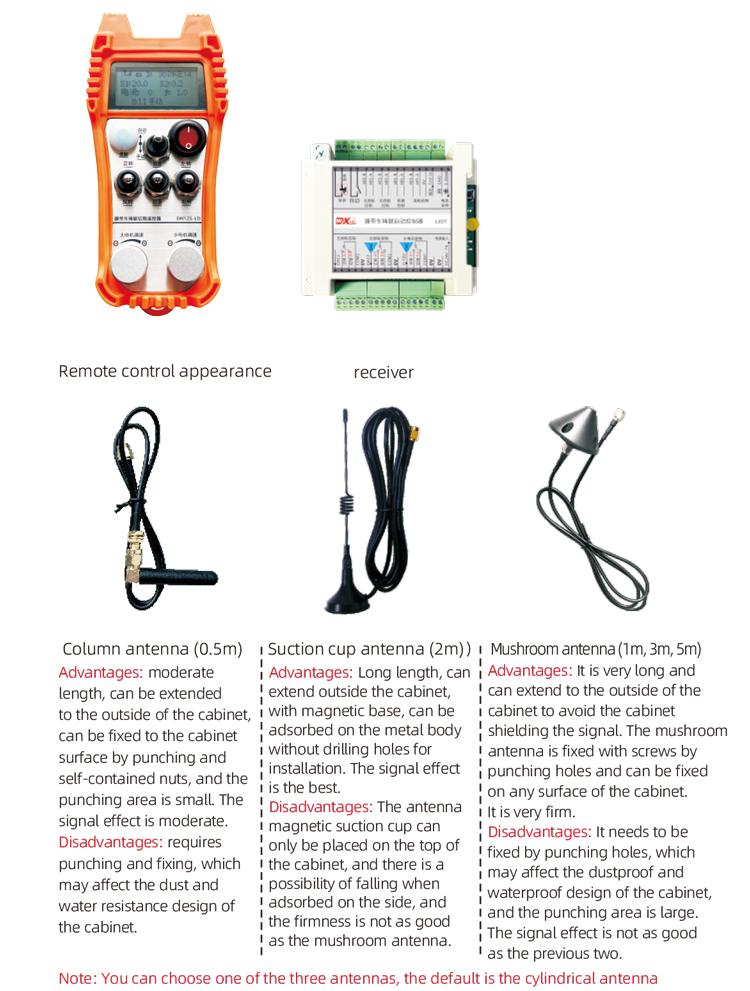
5. ແຜນວາດອຸປະກອນເສີມຜະລິດຕະພັນ
6. ຄູ່ມືການຕິດຕັ້ງຜະລິດຕະພັນ
6.1 ຂັ້ນຕອນການຕິດຕັ້ງຜະລິດຕະພັນ
1. ຕິດຕັ້ງເຄື່ອງຮັບໃນຕູ້ອັດຕາສ່ວນໄຟຟ້າຜ່ານຫົວເຂັມຢູ່ດ້ານຫຼັງ, ຫຼືຕິດຕັ້ງມັນຢູ່ໃນຕູ້ໄຟຟ້າໂດຍຜ່ານຮູ screw ຢູ່ສີ່ແຈຂອງຜູ້ຮັບ.
2. ອ້າງເຖິງແຜນວາດສາຍໄຟຂອງພວກເຮົາ, ປຽບທຽບອຸປະກອນໃນສະຖານທີ່ຂອງທ່ານ, ແລະເຊື່ອມຕໍ່ອຸປະກອນໃຫ້ກັບຜູ້ຮັບໂດຍຜ່ານສາຍໄຟ.
3. ຫຼັງຈາກຜູ້ຮັບໄດ້ຖືກແກ້ໄຂແລ້ວ, ເສົາອາກາດທີ່ມີໃຫ້ກັບຜູ້ຮັບຕ້ອງໄດ້ເຊື່ອມຕໍ່, ແລະດ້ານນອກຂອງເສົາອາກາດຕ້ອງໄດ້ຕິດຕັ້ງຫຼືວາງຢູ່ນອກຕູ້ໄຟຟ້າ. ມັນໄດ້ຖືກແນະນໍາໃຫ້ວາງມັນຢູ່ເທິງສຸດຂອງຕູ້ໄຟຟ້າສໍາລັບຜົນກະທົບທີ່ດີທີ່ສຸດ. ມັນຖືກຫ້າມບໍ່ໃຫ້ອອກຈາກເສົາອາກາດທີ່ບໍ່ມີສາຍພົວພັນຫຼືວາງເສົາອາກາດພາຍໃນຕູ້ໄຟຟ້າພາຍໃນຕູ້ເອກະສານ, ເຊິ່ງອາດຈະເຮັດໃຫ້ສັນຍານທີ່ບໍ່ດີແລະໃຊ້ບໍ່ໄດ້.
4. ທີ່ສຸດ, ຕິດຕັ້ງແບັດເຕີຣີໃນການຄວບຄຸມໄລຍະໄກ, ແຫນ້ນຝາປິດແບດເຕີລີ່, ແລະຫຼັງຈາກນັ້ນເປີດໃຊ້ໄຟຟ້າຂອງການຄວບຄຸມໄລຍະໄກ. ຫຼັງຈາກຈໍສະແດງຜົນດ້ານການຄວບຄຸມໄລຍະໄກສະແດງໃຫ້ເຫັນການໂຕ້ຕອບການເຮັດວຽກປົກກະຕິ, ທ່ານສາມາດປະຕິບັດການດໍາເນີນງານຄວບຄຸມໄລຍະໄກ.
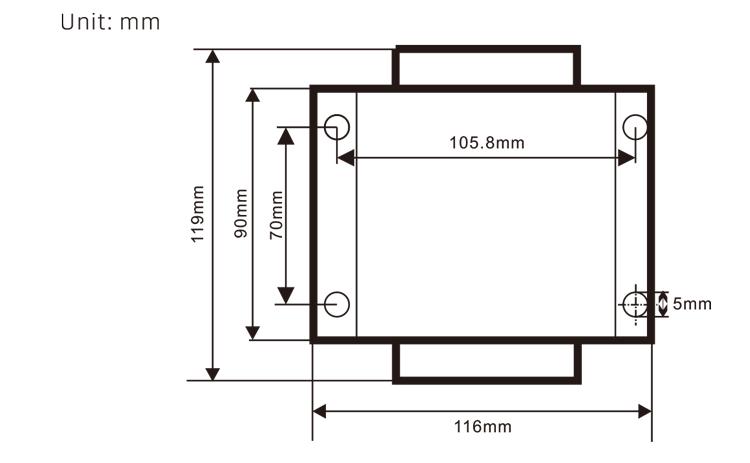
6.2 ຂະຫນາດການຕິດຕັ້ງຮັບ
6.3 ແຜນວາດສາຍໄຟສາຍ

7. ຄໍາແນະນໍາກ່ຽວກັບການປະຕິບັດງານຜະລິດຕະພັນ
7.1 ການຕັ້ງຄ່າພາລາມິເຕີຄວບຄຸມຫ່າງໄກສອກຫຼີກ
ວິທີການໃສ່ຕົວກໍານົດຄວາມເປັນມາຂອງຕົວຄວບຄຸມໄລຍະໄກ: ປ່ຽນໂຫມດປ່ຽນເປັນຮູບແບບຄູ່ມື, ປັບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ 25, ຫຼື 0, 10, 20, 40, 50, ແລະຫັນໄປທາງຫນ້າຂອງມໍເຕີຂະຫນາດໃຫຍ່ຂຶ້ນໄປ 3 ເວລາແລະລົງລຸ່ມ 3 ເວລາ;
ໃຊ້ “ການຄວບຄຸມຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍ” Knob ໃຫ້ປ່ຽນຫນ້າເວັບ, ກົດ Enable ແລະປ່ຽນ Knob ຄວບຄຸມຄວາມໄວຂະຫນາດນ້ອຍເພື່ອດັດແປງຕົວກໍານົດການ; ຫຼັງຈາກດັດແກ້, ປ່ຽນຫນ້າເວັບໃຫ້ສິ້ນສຸດລົງ, ເລືອກ Save ແລະ Oute, ແລະກົດປຸ່ມ Enable ເພື່ອອອກຈາກເມນູ;
ຕົວກໍານົດການແມ່ນມີດັ່ງຕໍ່ໄປນີ້:ກະແສສູງສຸດ: ລະດັບມູນຄ່າຂອງມໍເຕີຂະຫນາດໃຫຍ່ໃນປະຈຸບັນ, ການຕັ້ງຄ່າລະດັບ 15-200A, ໃນຕອນຕົ້ນ 60;
ຕົວກໍານົດການຄວບຄຸມຄວາມໄວ: ແບບອັດຕະໂນມັດໄວ Motor ໄວໂດຍອັດຕະໂນມັດຄວາມໄວເລັ່ງແບບອັດຕະໂນມັດ, ຂະຫນາດນ້ອຍກວ່າໄວກວ່າເກົ່າ, ລະດັບການຕັ້ງຄ່າ 200-1500, ໃນຕອນຕົ້ນ 1000;
ພາລາມິເຕີ Decelation: ກໍານົດຂີດຈໍາກັດດ້ານເທິງຂອງການປ່ຽນຄວາມໄວຂອງມໍເຕີອະນຸຍາດ. ໃນເວລາທີ່ການປ່ຽນແປງໃນປະຈຸບັນທີ່ເກີນມູນຄ່ານີ້, ມັນຈະຫຼອກລວງ. ມັນນ້ອຍກວ່າ, ຜູ້ຂັບຂີ່ທີ່ໄວແລະຂວາຈະຫຼອກລວງ. ຊ່ວງນັ້ນແມ່ນ 05-12, ແລະໃນຕອນຕົ້ນແມ່ນ 06;
ການເລັ່ງ A1: ມູນຄ່າທີ່ໃຫຍ່ກວ່າ, ຄວາມໄວຂອງມໍເຕີເພີ່ມຂື້ນໄດ້ໄວຂຶ້ນ, ຊ່ວງ 00-06, ຄ່າເລີ່ມຕົ້ນ 01; deceleration A2: ມູນຄ່າທີ່ໃຫຍ່ກວ່າ, ຄວາມໄວຂອງມໍເຕີຫຼຸດລົງໄວຂຶ້ນ, ກ້ອບ 00-06, ໃນຕອນຕົ້ນ 02;
ເປີດໃຊ້ກົດລະບຽບຄວາມໄວ: ບໍ່ວ່າຈະເປັນລະບຽບຄວາມໄວຂອງມໍເຕີຂະຫນາດນ້ອຍຕ້ອງໄດ້ຮັບການເປີດໃຊ້, 00 ບໍ່ໄດ້ຖືກເປີດໃຊ້ງານ, 01 ຖືກເປີດໃຊ້ງານ, ໃນຕອນຕົ້ນ 01;
ເລີ່ມຕົ້ນການລັອກຕົນເອງ: ບໍ່ວ່າມໍເຕີຂະຫນາດໃຫຍ່ຈະຮັກສາການລັອກດ້ວຍຕົນເອງໂດຍອັດຕະໂນມັດຫຼັງຈາກທີ່ຢູ່ຂ້າງຫນ້າແລະດ້ານຫຼັງແມ່ນຖືກປ່ອຍອອກມາ, 00 ບໍ່ໄດ້ຖືກຮັກສາໄວ້, 01 ຖືກຮັກສາໄວ້, ໃນຕອນຕົ້ນ 01;
ການເດີນທາງສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຊ້າຍແລະຂວາ, ກ້ອບ 10-100, ໃນຕອນຕົ້ນ 50;
ການຕັດກະແສ: ການຕັດສູງສຸດໃນປະຈຸບັນ, ຫນ້າຈໍສະແດງຄຸນຄ່າຂອງ IC, ກ້ອບ 15-160, ໃນຕອນຕົ້ນ 30, ຫນ້າຈໍສະແດງ ic: 30. ຂີດຈໍາກັດດ້ານເທິງຂອງຕົວກໍານົດນີ້ = ສູງສຸດ x ສູງສຸດ x 80%;
ຂີດຈໍາກັດຄວາມໄວໃນຕອນຕົ້ນ: ເຄື່ອງຈັກຕັດແບບຕັດໂດຍອັດຕະໂນມັດໃນຕອນຕົ້ນໃນຕອນເລີ່ມຕົ້ນ, ກ້ອບ 00-100, ໃນຕອນຕົ້ນ 10, ຫນ້າຈໍສະແດງ F1.0, ພາລາມິເຕີນີ້ແມ່ນຖືກຕ້ອງເທົ່ານັ້ນເມື່ອການເດີນທາງສູງສຸດເທົ່ານັ້ນທີ່ກໍານົດໄວ້ 50.
ຊ່ອງທາງໄຮ້ສາຍ: ຄ່າເລີ່ມຕົ້ນແມ່ນ 10. ເມື່ອສັນຍານຄວບຄຸມໄລຍະໄກແມ່ນບໍ່ສະຖຽນລະພາບຫຼືມີສັນຍານທີ່ມີສັນຍານຢູ່ໃນສະຖານທີ່, ທ່ານສາມາດດັດແປງພາລາມິເຕີນີ້ເພື່ອປ່ຽນຊ່ອງທາງເພື່ອຫລີກລ້ຽງການແຊກແຊງ;
ຂອບເຂດຈໍາກັດຄວາມໄວ: ຂີດຈໍາກັດດ້ານເທິງຂອງຄວາມໄວຕັດອັດຕະໂນມັດຂອງມໍເຕີຂະຫນາດນ້ອຍ,ກ້ອບ 00-200, ໃນຕອນຕົ້ນ 60, ຈໍສະແດງຜົນຫນ້າຈໍ 6.0; ສະແດງມູນຄ່າດ້ານເທິງ = ຂອບເຂດຈໍາກັດຄວາມໄວ× 0.1;
ເຈົ້າພາບສູງສຸດ: ຄວາມໄວສູງສຸດຂອງມໍເຕີຂະຫນາດໃຫຍ່, ກ້ອບ 10-100, ໃນຕອນຕົ້ນ 50;
ອຸປະກອນ Mbus ( ຈໍາເປັນ ): ການຄັດເລືອກຮູບແບບ inverther motorver, ກ້ອບ 00-03, ໃນຕອນຕົ້ນ 03;
00- ຊຽງໄຮ 01 ປະເທດ Fuji
02- ວິກແຫ 03 Inovance (Zhongchen, Robicon)
ອຸປະກອນ SBUS (ຈໍາເປັນ): ການຄັດເລືອກຮູບແບບເຄື່ອງປ່ຽນຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດນ້ອຍ, ກ້ອບ 00-05, ໃນຕອນຕົ້ນ 03;
00- ຊຽງໄຮ 01 ປະເທດ Fuji
02- ວິກແຫ 03 Inovance (Zhongchen, Robicon)
04-anchuanda 05- ບໍ່ມີ
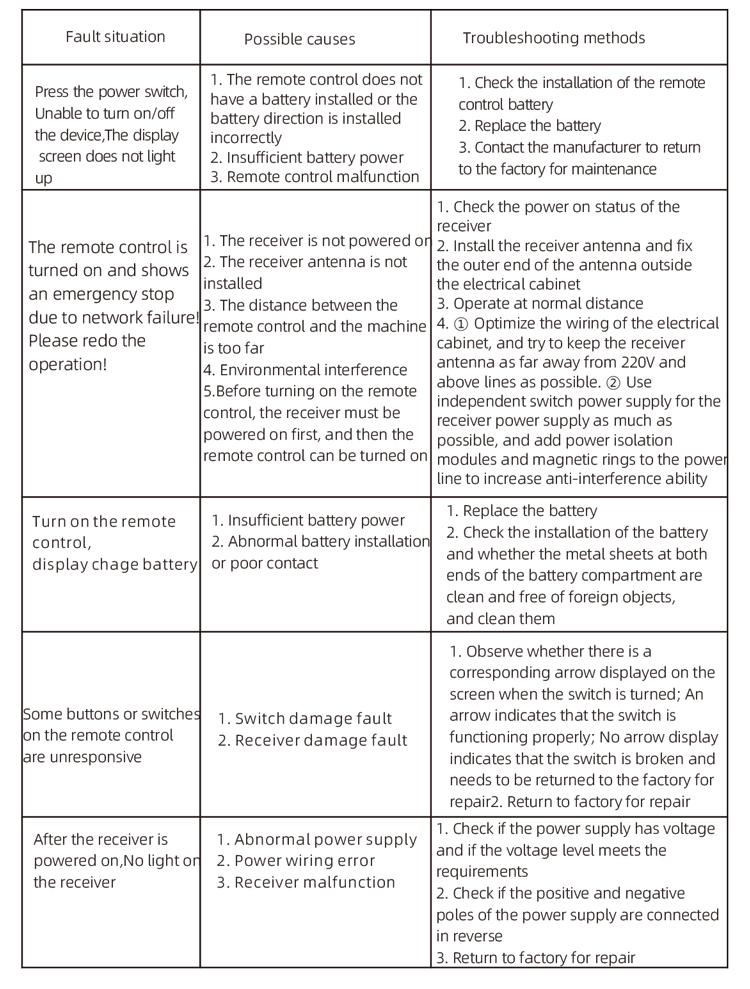
8. ການແກ້ໄຂບັນຫາຜະລິດຕະພັນ
7.2 ການຕັ້ງຄ່າພາລາມິເຕີຂອງຄວາມຖີ່ຂອງຄວາມຖີ່
1. ການຄັດເລືອກແຫຼ່ງຂໍ້ມູນຄໍາສັ່ງ: ຊ່ອງທາງການສື່ສານ
2. ການຄັດເລືອກແຫຼ່ງຄວາມຖີ່ຕົ້ນຕໍ: ການສື່ສານທີ່ມອບໃຫ້
3. ອັດຕາ Baud: 19200
4. ຮູບແບບຂໍ້ມູນ: ບໍ່ມີການຢັ້ງຢືນ, ຮູບແບບຂໍ້ມູນ<8-n-1>
5. ທີ່ຢູ່ທ້ອງຖິ່ນ: ກໍານົດແປງຄວາມຖີ່ຂອງຄວາມຖີ່ຂອງຊ້າຍ 1, ເຄື່ອງປ່ຽນຄວາມຖີ່ທີ່ຖືກຕ້ອງ 2, ແລະເຄື່ອງປ່ຽນຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດໃຫຍ່ 3
7.3 ຄໍາແນະນໍາໃນການຄວບຄຸມໄລຍະໄກ
1. ພະລັງງານຢູ່ໃນເຄື່ອງ, ເປີດການຄວບຄຸມໄລຍະໄກ, ໃສ່ພື້ນຫລັງໃນການຄວບຄຸມໄລຍະໄກ, ກໍານົດຕົວກໍານົດການຄວບຄຸມຄວາມເປັນມາໄກສອກຫຼີກ, ສ່ວນໃຫຍ່ແມ່ນການກໍານົດຮູບແບບຂອງເຄື່ອງປ່ຽນຄວາມຖີ່ຂອງມໍເຕີຂະຫນາດນ້ອຍແລະຂະຫນາດໃຫຍ່ (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງໄດ້ກໍານົດໄວ້ແລ້ວ);
2. ກໍານົດພາລາມິເຕີຂອງຕົວປ່ຽນຄວາມຖີ່ (ຂ້າມຂັ້ນຕອນນີ້ຖ້າຜູ້ຜະລິດເຄື່ອງໄດ້ກໍານົດໄວ້ແລ້ວ);
3. ກໍານົດການຄວບຄຸມໄລຍະໄກໃຫ້ເປັນຮູບແບບຄູ່ມື, ແລະຫຼັງຈາກນັ້ນໃຊ້ການຄວບຄຸມໄລຍະໄກເພື່ອຍ້າຍເຄື່ອງເຂົ້າໄປໃນຕໍາແຫນ່ງທີ່ເຮັດວຽກ;
4. ໃນຮູບແບບຄູ່ມື, ກໍານົດຄ່າ IC ສໍາລັບການຕັດມໍເຕີແລະຄວາມໄວຂອງມໍເຕີຂະຫນາດໃຫຍ່;
5. ປ່ຽນເປັນແບບອັດຕະໂນມັດແລະກໍານົດການຕັດຄວາມໄວຂອງຄວາມໄວ FE FE ມູນຄ່າສໍາລັບມໍເຕີຂະຫນາດນ້ອຍ;
6. ໃນຮູບແບບອັດຕະໂນມັດ, ປ່ຽນເຄື່ອງມືປ່ຽນຂະຫນາດໃຫຍ່ເພື່ອເລີ່ມຕົ້ນການຜະລິດມໍເຕີຂະຫນາດໃຫຍ່, ແລະຫຼັງຈາກນັ້ນເຮັດໃຫ້ເຄື່ອງຈັກປ່ຽນໄປຂ້າງຫນ້າຫຼືປີ້ນກັບກັນ. ການຄວບຄຸມໄລຍະໄກເຂົ້າສູ່ຮູບແບບການຕັດອັດຕະໂນມັດແລະເລີ່ມຕົ້ນການຕັດ.
9.ການບໍາລຸງຮັກສາ
1. ກະລຸນາໃຊ້ມັນໃນສະພາບແວດລ້ອມແຫ້ງໃນອຸນຫະພູມໃນຫ້ອງແລະຄວາມກົດດັນເພື່ອຂະຫຍາຍຊີວິດການບໍລິການຂອງຕົນ.
2. ກະລຸນາຫລີກລ້ຽງການໃຊ້ໃນສະພາບແວດລ້ອມທີ່ຜິດປົກກະຕິເຊັ່ນ: ຝົນແລະຟອງນ້ໍາເພື່ອໃຫ້ອາຍຸການບໍລິການ.
3. ກະລຸນາຮັກສາຫ້ອງປະກອບແບັດເຕີຣີແລະບໍລິເວນໂລຫະທີ່ສະອາດ.
4. ກະລຸນາຫຼີກລ່ຽງການທໍາລາຍການຄວບຄຸມໄລຍະໄກເນື່ອງຈາກບີບແລະຫຼຸດລົງ.
5. ຖ້າບໍ່ໃຊ້ເປັນເວລາດົນນານ, ກະລຸນາຖອດແບັດເຕີຣີອອກແລະເກັບມ້ຽນທີ່ຫ່າງໄກສອກຫຼີກແລະແບດເຕີລີ່ໃນບ່ອນທີ່ສະອາດແລະປອດໄພ.
6.ໃນລະຫວ່າງການເກັບຮັກສາແລະການຂົນສົ່ງ, ຄວນເອົາໃຈໃສ່ຄວນຈ່າຍໃຫ້ກັບຄວາມຊຸ່ມຊື່ນແລະຄວາມຕ້ານທານຊ shock ອກ.
10. ຂໍ້ມູນຄວາມປອດໄພ
1. ກະລຸນາອ່ານຄໍາແນະນໍາຢ່າງລະມັດລະວັງກ່ອນທີ່ຈະໃຊ້ແລະຫ້າມຜູ້ຊ່ຽວຊານຈາກການປະຕິບັດງານ.
2. ກະລຸນາປ່ຽນຫມໍ້ໄຟໃຫ້ທັນເວລາເມື່ອແບັດເຕີຣີຕ່ໍາເກີນໄປເພື່ອຫລີກລ້ຽງຄວາມຜິດພາດທີ່ເກີດຈາກພະລັງງານທີ່ບໍ່ພຽງພໍ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດການຄວບຄຸມໄລຍະໄກແມ່ນບໍ່ສາມາດປະຕິບັດງານໄດ້.
3. ຖ້າຕ້ອງການສ້ອມແປງ, ກະລຸນາຕິດຕໍ່ຜູ້ຜະລິດ. ຖ້າຄວາມເສຍຫາຍແມ່ນເກີດມາຈາກການສ້ອມແປງຕົວເອງ, ຜູ້ຜະລິດຈະບໍ່ໃຫ້ການຮັບປະກັນ






