ဖေါ်ပြချက်
1. ထုတ်ကုန်နိဒါန်း
Track Car Rope Saw ကိုအလိုအလျောက်ဖြတ်တောက်ခြင်းအတွက်အဝေးထိန်းခလုတ်သည် Track Type ကြိုးမြင်ရန်သင့်တော်သည်
ဖြတ်စက်များ. ဒါဟာအသုံးပြုသည် 485 ဘယ်ဘက်နှင့်ညာဘက်လမ်းကြောင်းအကြိမ်ရေကိုထိန်းချုပ်ရန် Modbus RTU protocol ကို
ပြောင်းရွှေ့သူများ, အများအပြားမော်တာအကြိမ်နှုန်းပြောင်းလဲခြင်းမြန်နှုန်းကိုထိန်းချုပ်မှုစတင်ခြင်းနှင့်ရှေ့, နောက်ဘက်မှာ,
လက်ဝဲနှင့်ညာဘက်ညွှန်ကြားချက် controllers. ၎င်းသည်ကြီးမားသောမော်တာအကြိမ်ရေ၏အလုပ်လုပ်နေသောလက်ရှိအခြေအနေကိုဖတ်ရှုနိုင်သည်
မှတဆင့် converter 485 Modbus RTU protocol. ၏လက်ရှိအချိန်တွင်ဆန်းစစ်ခြင်းနှင့်နှိုင်းယှဉ်ခြင်းအားဖြင့်
ကြီးမားသောမော်တာ, ဘယ်ဘက်နှင့်ညာဘက်လမ်းကြောင်းများ၏အမြန်နှုန်းကိုအလိုအလျောက်အချိန်အတွက်အလိုအလျောက်ချိန်ညှိနိုင်သည်
အလိုအလျောက်ဖြတ်တောက်ခြင်း function ကိုရယူပါ.
2. ထုတ်ကုန်အလုပ်လုပ်တဲ့အင်္ဂါရပ်များ
1. 433mhz ကြိုးမဲ့ဆက်သွယ်ရေးနည်းပညာကိုကျင့်သုံးခြင်း, တစ် ဦး ကြိုးမဲ့ operating အကွာအဝေးနှင့်အတူ 100 မီတာ.
2. အလိုအလျောက်ကြိမ်နှုန်းကို hopping function ကိုချမှတ် 32 ကြိုးမဲ့ဝေးလံခေါင်သီသောထိန်းချုပ်သူများ၏အစုံ
တစ်ပြိုင်နက်တည်း, တစ် ဦး ချင်းစီကတခြားထိခိုက်ခြင်းမရှိဘဲ.
3. နှင့်အတူအားလုံးကြိမ်နှုန်း clarter ကိုထောက်ပံ့ 485 Modbus RTU protocol, နှင့်လက်ရှိသဟဇာတကြိမ်နှုန်း
converter ကုန်အမှတ်တံဆိပ်များတွင်ပါဝင်သည်:ရှန်ဟိုင်း Xielin, ဖူဂျီ, ဟွန်ယန်, zhongchen, ရေှာင့်မေှးအင်္ဂါ, နှင့် . အမှတ်တံဆိပ်များအတွက်
သဟဇာတမ, ကျေးဇူးပြုပြီးစိတ်ကြိုက်ပြင်ဆင်ခြင်းအတွက်ဆက်သွယ်ပါ.
4. Support မြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ, စတင်ခြင်း, နှင့်ကြီးမားသောမော်တာကြိမ်နှုန်း classers ၏လက်ရှိစာဖတ်ခြင်း.
5. လက်ဝဲနှင့်မှန်ကန်သောခြေရာခံကြိမ်နှုန်း converter seeder seeder ကိုစည်းမျဉ်းစည်းကမ်းများ, စတင်ခြင်း, ရေှ့, ပြန်., ဘယ်ဘက်နှင့်ညာထိန်းချုပ်မှု.
6. စက်ကိုလမ်းလျှောက်ရန်ဘယ်ဘက်နှင့်ညာခြေရာခံအကြိမ်ရေကူးပြောင်းမှုကို Linear ဆုံးမပဲ့ပြင်ခြင်း
မျဉ်းဖြောင့်.
7. ကြိုး saw ၏အလိုအလျှောက်ဖြတ်တောက်ခြင်း function ကိုထောကျပံ့, အလိုအလျှောက်လက်ဝဲနှင့်ညာဘက်လမ်းကြောင်းမြန်နှုန်းကိုချိန်ညှိပါ
ကြီးမားသောမော်တာ၏လက်ရှိသတင်းအချက်အလက်အရအစစ်အမှန်အချိန်.
8. ၎င်းသည်မော်တာစတင်ခြင်းနှင့်ရပ်တန့်ခြင်းအတွက်တိုက်ရိုက် IO output control နှင့်လည်းလိုက်ဖက်သည်, နှင့် analog voltage output ကို
မော်တာမြန်နှုန်းကိုထိန်းချုပ်ရန်.
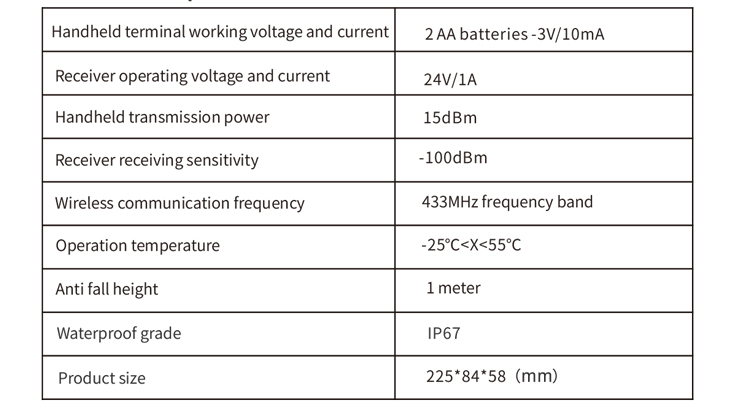
3. ထုတ်ကုန်သတ်မှတ်ချက်များ
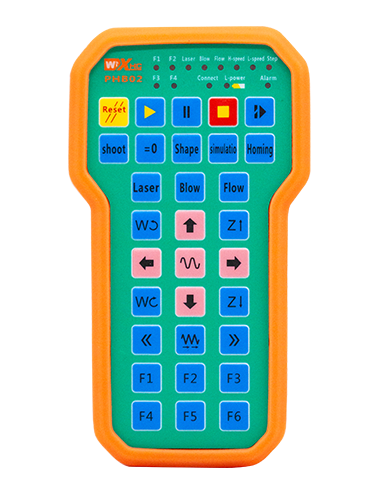
4. ထုတ်ကုန် function ကိုမိတ်ဆက်ခြင်း
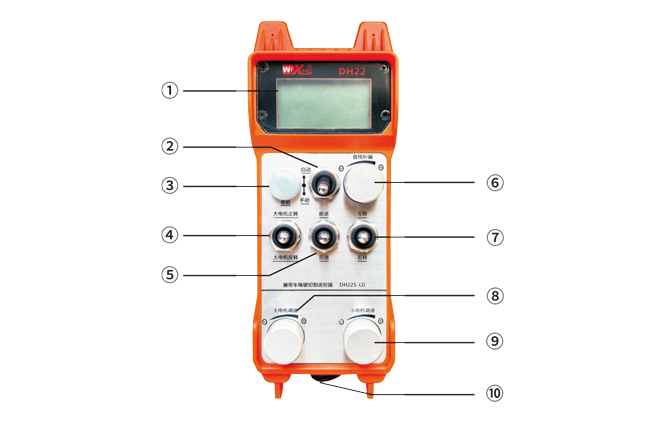
မှတ်စုများ:
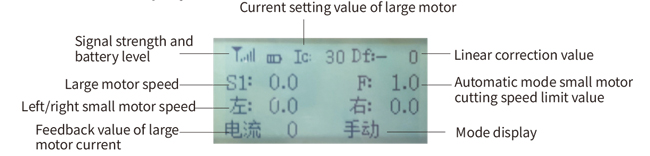
①screen display ကို:
②mode switch ကို:
ခဲသန်ပါ:
ပေါင်းစပ်ခလုတ်များ, အချို့သောစစ်ဆင်ရေးများသည်စစ်ဆင်ရေးအတွက် Enable ခလုတ်ကိုဖိထားရန်လိုအပ်သည်,အသေးစိတ်အတွက် switch တစ်ခုစီအတွက်ညွှန်ကြားချက်များကိုကြည့်ပါ.
④largeမော်တာခလုတ်:
3-speed reset switch ကိုသုံးခြင်း, ဤ switch ကိုဆွဲထုတ်ခြင်းသည်ကြီးမားသောမော်တာ၏ရှေ့သို့နှင့်ပြောင်းပြန်လည်ပတ်မှုကိုထိန်းချုပ်နိုင်သည်. ထုတ်လွှတ်ပြီးနောက်, ပြည်နယ်ဆက်လက်တည်ရှိလိမ့်မည်, နှင့်မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်. S1 ↑ arrow သည်ရှေ့သို့လည်ပတ်မှုကိုဖော်ပြသည်, နှင့် S1 ↓ arrow သည် Evse Rotation ကိုညွှန်ပြသည်.
⑤smallမော်တာရှေ့ forward / ပြောင်းပြန် switch ကို:
သေးငယ်တဲ့မော်တာက 3 မြန်နှုန်း Self-locking switch ကိုတပ်ဆင်ထားသည်. Enable ခလုတ်ကို နှိပ်. ဤခလုတ်ကိုဆွဲယူခြင်းကရှေ့သို့နှင့်နောက်ပြန်လှည့်ရန်မော်တာကိုထိန်းချုပ်နိုင်သည်, နှင့်သက်ဆိုင်ရာ display ကို screen ပေါ်မှာပေါ်လာလိမ့်မည်။ ↑↑ arrow သည်ရှေ့ဆက်ကိုယ်စားပြုသည်, ↓↓ arrow နောက်ပြန်ကိုယ်စားပြုတယ်.
⑥မျဉ်းဖြောင့်ဆုံးမပဲ့ပြင်မှု:
Multi အလှည့် encoder fatob ကိုအသုံးပြုခြင်း, Enable ခလုတ်ကိုနှိပ်ပါ, အဖုကိုညာဘက်လှည့်, နှင့်ဖြောင့်လိုင်းဆုံးမခြင်းကိုပြသပါ: ခရု: လက်ဝဲအလှည့်အသညျတိုးပွားလာ 1 လည်ပတ်နှုန်းယူနစ်, နှင့်လက်ဝဲ
မော်တာမြန်နှုန်းတိုးလာသည် 0.1 တခု; ဘယ်ဘက်ဖလားကိုလှည့်ပါ, ဖြောင့်လိုင်းပြင်ဆင်ချက်မျက်နှာပြင်: ခရု: ညာဘက်တွင်, အားဖြင့်ဘူးသီး၏အလှည့်တိုင်း 1 တခု, နှင့်ညာဘက်မော်တာ၏အမြန်နှုန်းတိုးပွားလာ
ဖြင့် 0.1 တခု.
⑦smallမော်တာလှည့်ပြောင်းခြင်း:
3-speed reset switch ကိုသုံးခြင်း, ကိုယ်တိုင်လည်ပတ်နေစဉ်, သေးငယ်သောမော်တာကိုဘယ်ဘက်သို့မဟုတ်ညာသို့လှည့်ရန်ထိန်းချုပ်နိုင်သည်. တစ်ချိန်ကဖြန့်ချိ, ဝေးလံခေါင်သီထိန်းချုပ်မှုသည်ဤလုပ်ဆောင်ချက်ကိုအလိုအလျောက်ရပ်တန့်သွားမည်. ရှေ့ဆက်ပြည်နယ်အတွက်, ဒီ switch ကိုလှည့်သောအခါ, သက်ဆိုင်ရာ display ကိုမျက်နှာပြင်ပေါ်တွင်ပေါ်လာလိမ့်မည်. ← arrow သည်လက်ဝဲဘက်ဖော်ပြသည်, ↑↑→ arrow သည်ညာဘက်အလှည့်ကိုညွှန်ပြသည်။ ပြောင်းပြန် mode မှာ, ဒီ switch ကိုဖွင့်ပြီးသက်ဆိုင်ရာ display ကိုမျက်နှာပြင်ပေါ်မှာပေါ်လာလိမ့်မယ်. ← arrow သည်လက်ဝဲဘက်ဖော်ပြသည်, နှင့်↓→ arrow ညာဘက်အလှည့်ညွှန်ပြ.
⑧ကြီးမားသောမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ:
Multi အလှည့် encoder fatob ကိုအသုံးပြုခြင်း, လှည့် 1 အချိန်တိုင်းဇယားကွက်, ခန့်မှန်းခြေအားဖြင့်ကြီးမားသောမော်တာပြောင်းလဲမှုများ၏မြန်နှုန်းတန်ဖိုး 0.2 ယူနစ်. အစာရှောင်ခြင်းအလှည့်သည်ကြီးမားသောမော်တာ၏မြန်နှုန်းတန်ဖိုးကိုလျင်မြန်စွာပြုပြင်နိုင်သည်.
⑨အသေးစားမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ:
Multi အလှည့် encoder fatob ကိုအသုံးပြုခြင်း, manual mode မှာ, Enable ခလုတ်ကိုနှိပ်ပြီးတစ်ချိန်တည်းမှာတစ် ဦး ကဇယားကွက်ကိုလှည့်ပါ,ဘယ်ဘက်နှင့်လက်ဝဲသေးငယ်သည့်မော်တာ၏မြန်နှုန်းတန်ဖိုးကိုပြောင်းလဲသွားသည် 0.1 ယူနစ်, နှင့်အမြန်လည်ပတ်သည် motor.in အလိုအလျောက် mode ၏မြန်နှုန်းတန်ဖိုးကိုလျင်မြန်စွာပြုပြင်နိုင်သည်, Enable ခလုတ်ကို နှိပ်. တစ်ကြိမ်တွင်ဇယားကွက်တစ်ခုလှည့်ပါ,မြန်နှုန်းကန့်သတ်ချက်ကိုခန့်မှန်းခြေအားဖြင့်သေးငယ်တဲ့မော်တာပြောင်းလဲမှုများ f ကိုကန့်သတ်တန်ဖိုး 0.1 ယူနစ်. လျင်မြန်စွာလည်ပတ်ခြင်းသည်အသေးစားမော်တာ၏မြန်နှုန်းကန့်သတ်တန်ဖိုးကိုလျင်မြန်စွာပြုပြင်နိုင်သည်.
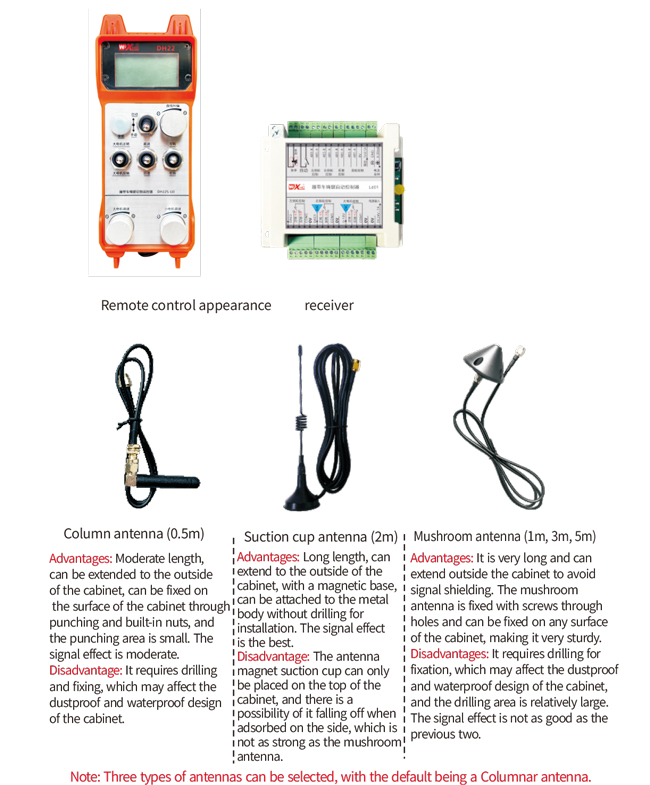
⑩ Remote Control Power Switch
Remote Control display မျက်နှာပြင်ကိုဖွင့်ထားသည်.
5. ထုတ်ကုန်ဆက်စပ်ပစ္စည်းပုံကြမ်း
6. ကုန်ပစ္စည်းတပ်ဆင်ခြင်းလမ်းညွှန်
6.1 ကုန်ပစ္စည်းတပ်ဆင်ခြင်းအဆင့်များ
1. လက်ခံသူကိုလျှပ်စစ်ဓာတ်ရုံသို့ကူးယူပါ, သို့မဟုတ်လက်ခံသူလေးထောင့်ရှိဝက်အူတွင်းများမှတဆင့်ကက်ဘိနက်သို့တပ်ဆင်ပါ.
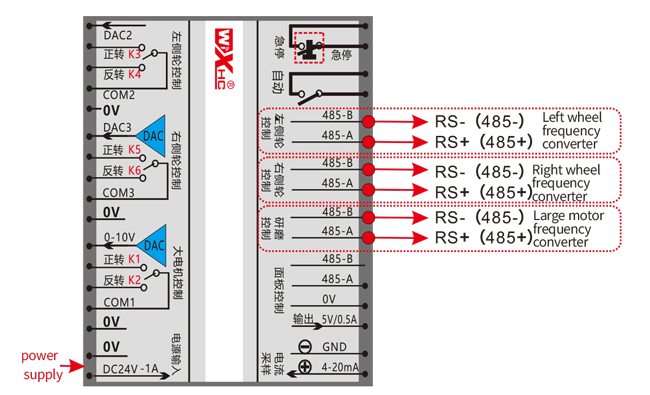
2. ကျွန်ုပ်တို့၏ receiver ဝါယာကြိုးပုံကိုရည်ညွှန်းပြီး၎င်းကိုသင်၏ 0 က်ဘ်ဆိုက်ကိရိယာများနှင့်နှိုင်းယှဉ်ပါ. ပစ္စည်းကိရိယာများကိုဝါယာကြိုးများမှတဆင့်လက်ခံသူထံဆက်သွယ်ပါ.
3. အဆိုပါလက်ခံ fixing ပြီးနောက်, ReBerner တွင်တပ်ဆင်ထားသောအင်တင်နာကိုချိတ်ဆက်ရန်နှင့်လျှပ်စစ်အဖွဲ့အစည်းပြင်ပရှိအင်တင်နာ၏အဆုံးကိုတပ်ဆင်ရန်သို့မဟုတ်နေရာချရန်လိုအပ်သည်. ၎င်းကိုအကောင်းဆုံးသောကက်ဘိနက်၏ထိပ်ဆုံးတွင်ဖော်ပြရန်အကြံပြုသည်. Antenna unnonna ကိုသီးခြားခွဲထားရန်တားမြစ်ထားသည်, ဒါကြောင့် signal ကိုအသုံးမပြုနိုင်ဖို့ဖြစ်ပေါ်စေနိုင်သည်.
4. နောက်ဆုံး, ဝေးလံခေါင်သီထိန်းချုပ်မှုရှိဘက်ထရီကို install လုပ်ပါ, ဘက်ထရီအဖုံးတင်းကျပ်, နှင့်ဝေးလံခေါင်သီထိန်းချုပ်မှု၏အစွမ်းအပြောင်းကိုဖွင့်ပါ. ဝေးလံခေါင်သီထိန်းချုပ်မှုမျက်နှာပြင်မျက်နှာပြင်ပုံမှန်ပြသထားတယ်
အလုပ်လုပ် interface, ဝေးလံခေါင်သီထိန်းချုပ်မှုစစ်ဆင်ရေးဖျော်ဖြေနိုင်ပါတယ်.
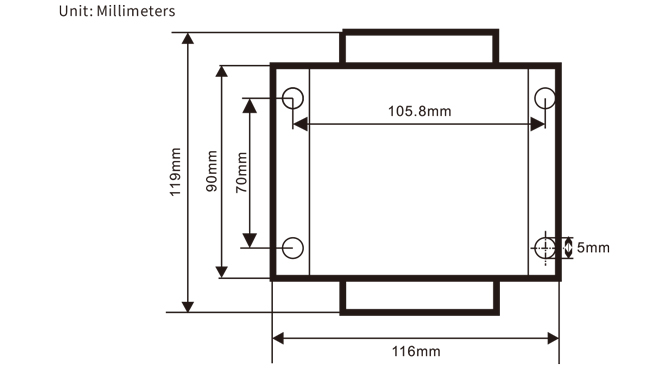
6.2 celever installation dimensions
6.3 လက်ခံသူဝါယာကြိုးရည်ညွှန်းပုံ
7. ကုန်ပစ္စည်းစစ်ဆင်ရေးညွှန်ကြားချက်များ
7.1 Remote Control Parameter ချိန်ညှိချက်များ
ဝေးလံခေါင်သီထိန်းချုပ်မှု parameters တွေကိုရိုက်ထည့်ရန်နည်းလမ်း:
mode switch ကို mode ခလုတ်ကိုဖွင့်ပါ, အသေးစားမော်တာ၏အမြန်နှုန်းကိုညှိပါ 25 နှစ်ဖက်စလုံးတွင်, သို့မဟုတ် 0, 10, 20, 40, 50 အားလုံးနှစ်ဖက်အပေါ်, နှင့်စဉ်ဆက်မပြတ်ကြီးမားသောမော်တာ၏ရှေ့ဆက် switch ကိုဖွင့် 3 ကြိမ်နှင့်ချ 3 ကေြှ;
သုံးပါ “အသေးစားမော်တာအမြန်ထိန်းချုပ်မှု” စာမျက်နှာများကိုလှန်ရန်အဖု, Enable ခလုတ်ကိုနှိပ်ပါ, ပြီးတော့ parameters တွေကိုပြုပြင်မွမ်းမံဖို့သေးငယ်တဲ့မော်တာမြန်နှုန်းထိန်းချုပ်မှုဘူးသီးကိုလှည့်. ပြုပြင်မွမ်းမံပြီးနောက်, စာမျက်နှာကိုအဆုံးသို့လှည့်ပါ,ရေှးထား “ကယ်ဆယ်” ထွက်ရန်, Menu မှထွက်ရန် Enable ခလုတ်ကိုနှိပ်ပါ;
အဆိုပါ parameters တွေကိုအောက်ပါအတိုင်းဖြစ်ကြသည်:
အများဆုံးလက်ရှိ: ကြီးမားသောမော်တာလက်ရှိ၏တုံ့ပြန်ချက်အကွာအဝေး, သတ်မှတ်ထားတဲ့အကွာအဝေး 15-200a, ပျက်ကွက်ခြင်း 100;
မြန်နှုန်းထိန်းချုပ်မှု parameters တွေကို: အလိုအလျောက် mode ကို, အသေးစားမော်တာသည်ပိုမိုမြန်ဆန်စွာနှေးကွေးသည်သို့မဟုတ်နှေးကွေးသည်,ပိုမြန်သေးငယ်, သတ်မှတ်ထားတဲ့အကွာအဝေး 200-1500, ပျက်ကွက်ခြင်း 800;
deceleration parameter သည်: မော်တာအမြန်နှုန်းကိုပြောင်းလဲခွင့်ပြုသည့်အထက်ကန့်သတ်ချက်ကိုသတ်မှတ်ပါ. ဒီတန်ဖိုးကိုကျော်လွန်လက်ရှိအပြောင်းအလဲများ, အဆိုပါ deceleration ပေါ်ပေါက်လိမ့်မည်. သေးငယ်တဲ့, လက်ဝဲနှင့်ညာဘက်မော်တာများ၏ deceleration ပိုမိုမြန်ဆန်, တစ်အကွာအဝေးနှင့်အတူ 05-12 နှင့်တစ် ဦး ၏ default 06;
Accounteration A1: ပိုကြီးတဲ့မော်တာမြန်နှုန်း, ပိုမြန်သည်တိုးပွားလာသည်, တစ်အကွာအဝေးနှင့်အတူ 00-06 နှင့်တစ် ဦး ၏ default 01;
Deceleration A2: ပိုကြီးတဲ့မော်တာမြန်နှုန်း, ပိုမြန်ကလျော့နည်းစေသည်, တစ်အကွာအဝေးနှင့်အတူ 00-06 နှင့်တစ် ဦး ၏ default 02;
မြန်နှုန်းစည်းမျဉ်းကိုဖွင့်ပါ: သေးငယ်တဲ့မော်တာမြန်နှုန်းစည်းမျဉ်းကိုဖွင့်ထားရန်လိုအပ်ပါသလား? 00 enable ပါဘူး, 01 ဖွင့်, ပုံမှန်ဖြစ်ပါတယ် 01;
Self-lock ကိုစတင်ပါ: ကြီးမားသောမော်တာသည်ရှေ့သို့ switches နှင့်ပြောင်းပြန် switches များကိုဖြန့်ချိပြီးနောက်ကြီးမားသောသော့ခတ်ခြင်းကိုအလိုအလျောက်ထိန်းသိမ်းထားပါသလား? 00 မကိုင်ပါဘူး, 01 ကိုင်ထားသူ, ပျက်ကွက်ခြင်း 01
အများဆုံးလမ်းလျှောက်: ဘယ်ဘက်နှင့်ညာဘက်မော်တာ၏အမြင့်ဆုံးအမြန်နှုန်း, အကွာအဝေး 10-100, ပျက်ကွက်ခြင်း 50;
လက်ရှိဖြတ်တောက်ခြင်း: အများဆုံးဖြတ်တောက်ခြင်းလက်ရှိ, IC တန်ဖိုးအဖြစ်မျက်နှာပြင်ပေါ်တွင်ပြသ, အကွာအဝေး 15-160, ပျက်ကွက်ခြင်း 30,
IC မှသက်ဆိုင်ရာ: 30 မျက်နှာပြင်ပေါ်မှာပြသ. ဒီ parameter သည်၏အထက်ကန့်သတ်ချက်ဖြစ်ပါတယ် 80% အများဆုံးလက်ရှိ၏;
ပုံမှန်မြန်နှုန်းကန့်သတ်ချက်: ပုံမှန်သေးငယ်တဲ့မော်တာအလိုအလျောက်ဖြတ်တောက်ခြင်းအမြန်နှုန်းသည်အကွာအဝေးအတွင်း၌ရှိသည် 0-100, တစ် ဦး default နှင့်အတူ 10. မျက်နှာပြင် f1.0 displays, နှင့်ဤ parameter သည်အများဆုံးလမ်းလျှောက်ရန်သတ်မှတ်သောအခါသာတိကျသည် 50.
အလိုအလျောက် mode ကို: သတ်မှတ်ထားပါ 00, အလိုအလျောက် / လက်စွဲခလုတ်သည် mode switch ကိုဖြစ်သည်. သတ်မှတ်ထားပါ 01, အလိုအလျောက် / လက်စွဲ switch သည်အလိုအလျောက်အနေအထားသို့သတ်မှတ်ထားသည်, မျက်နှာပြင်မျက်နှာပြင်အလင်းရောင်ပြသထားတယ်, နှင့်လက်ခံသူအပေါ်အလိုအလျောက် terminal output ကိုပိတ်ထားသည်. ဘယ်အချိန်မှာလက်စွဲစာအုပ်, အလိုအလျောက် output terminal ကိုအဆက်ပြတ်နေသည်;
မြန်နှုန်းကန့်သတ်သွေဖီ: သေးငယ်တဲ့မော်တာ၏အလိုအလျောက်ဖြတ်တောက်ခြင်းအမြန်နှုန်း၏အထက်ကန့်သတ်ချက် 00 သို့ 200, တစ် ဦး default နှင့်အတူ 60 နှင့်တစ် ဦး သက်ဆိုင်ရာ display ကို 6.0 မျက်နှာပြင်ပေါ်မှာ; Display Value = အမြန်နှုန်းကန့်သတ်ချက်ကို offset x 0.1;
အများဆုံးအိမ်ရှင်: ကြီးမားသောမော်တာ၏အမြင့်ဆုံးမြန်နှုန်း, အကွာအဝေး 10-100, ပျက်ကွက်ခြင်း 50;
Mius ပစ္စည်းကိရိယာများ (အတင်းအကျပ်ဖြစ်သော): ကြီးမားသောမော်တာကြိမ်နှုန်း converter ကိုရွေးချယ်ခြင်း, အကွာအဝေး 00-03, ပျက်ကွက်ခြင်း 03;
00- ရှန်ဟိုင်း xiulin 01-Fuji
02-03-inovance (zhongchen), ရရောို့လုံး
SBUS ပစ္စည်းကိရိယာများ (အတင်းအကျပ်ဖြစ်သော): အသေးစားမော်တာကြိမ်နှုန်း converter ကိုရွေးချယ်ခြင်း, အကွာအဝေး 00-05, ပျက်ကွက်ခြင်း 03;
00- ရှန်ဟိုင်း xiulin 01-Fuji
02-03-inovance (zhongchen), ရရောို့လုံး
04-roadchaanda 05-none
7.2 ကြိမ်နှုန်း converterter parameterter setting ကို
1. Command Source Selection: ဆက်သွယ်ရေး command channel
2. အဓိကကြိမ်နှုန်းအရင်းအမြစ်ရွေးချယ်ခြင်း: ဆက်သွယ်ရေးပေးထားသည်
3. Baud Rate: 19200
4. ဒေတာပုံစံ: အတည်ပြုခြင်းမရှိပါ, ဒေတာပုံစံ<8-n-1>
5. ဒေသခံလိပ်စာ: လက်ဝဲကြိမ်နှုန်း converter ကိုသတ်မှတ်ပါ 1, မှန်ကန်သောကြိမ်နှုန်း converter 2, နှင့်
ရန်ကြီးမားသောမော်တာကြိမ်နှုန်း converter 3
7.3 Remote Control စစ်ဆင်ရေးညွှန်ကြားချက်
1. စက်ပေါ်ပါဝါ, ဝေးလံခေါင်သီထိန်းချုပ်မှုအပေါ်လှည့်, ဝေးလံခေါင်သီထိန်းချုပ်မှု backend ရိုက်ထည့်ပါ, သတ်မှတ်ပါ
Remote Control Parametersters, အဓိကအားဖြင့်အသေးစားမော်တာနှင့်ကြီးမားသောမော်တာကြိမ်နှုန်းကိုချိန်ညှိခြင်း
converter မော်ဒယ်များ: (စက်ထုတ်လုပ်သူပြီးသားသတ်မှတ်ထားပါကဤအဆင့်ကိုကျော်ပါ);
2. ကြိမ်နှုန်း converterter ၏ parameters တွေကိုသတ်မှတ်ထားပါ (စက်ထုတ်လုပ်သူဆိုပါကဤအဆင့်ကိုကျော်လိုက်ပါ
ပြီးပြီ);
3. Remote ထိန်းချုပ်မှုကို manual mode သို့သတ်မှတ်ပါ, ပြီးတော့စက်ကိုရွှေ့ဖို့ဝေးလံခေါင်သီထိန်းချုပ်မှုကိုသုံးပါ
အလုပ်လုပ်အနေအထား;
4. manual mode မှာ, ကြီးမားသောမော်တာ၏ကြီးမားသောမော်တာ၏ curment ကို set နှင့်မော်တာ၏အမြန်နှုန်းကိုသတ်မှတ်ပါ
5. အလိုအလျောက် mode သို့ပြောင်းပြီးသေးငယ်တဲ့မော်တာအတွက်ဖြတ်တောက်ခြင်းကို cutting f တန်ဖိုးကိုသတ်မှတ်ပါ;
6. အလိုအလျောက် mode မှာ, ကြီးမားသောမော်တာကိုစတင်ရန်အတွက်ကြီးမားသောမော်တာခလုတ်ကိုဖွင့်ပါ, ထို့နောက်
ရှေ့ဆက်သို့မဟုတ်ပြောင်းပြန်ဖို့သေးငယ်တဲ့မော်တာ switch ကို, နှင့်ဝေးလံခေါင်သီထိန်းချုပ်မှုအလိုအလျောက်ဖြတ်တောက်ခြင်းထဲသို့ဝင်
ဖြတ်တောက်ခြင်းစတင်ရန် mode ကို.
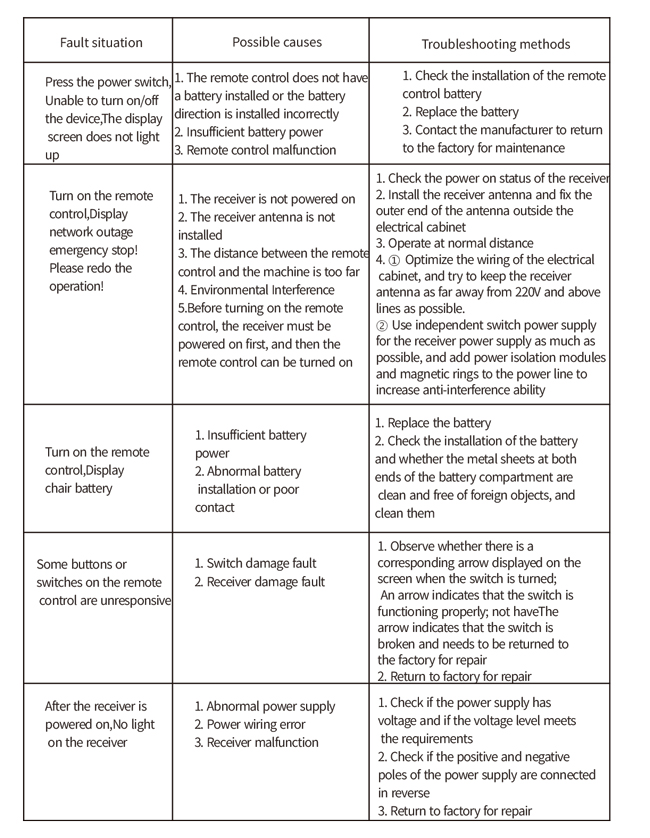
8.ထုတ်ကုန်ပြ troubl နာဖြေရှင်းခြင်း
9.တည်မြဲစေခြင်း
1. ကျေးဇူးပြု. ၎င်းကိုအခန်းအပူချိန်တွင်ခြောက်သွေ့သောပတ် 0 န်းကျင်တွင် သုံး. ၎င်း၏ 0 န်ဆောင်မှုသက်တမ်းကိုတိုးချဲ့ရန်ဖိအားပေးပါ.
2. ကျေးဇူးပြုပြီး 0 န်ဆောင်မှုသက်တမ်းကိုတိုးချဲ့ရန်မိုးနှင့်ရေပူဖောင်းများကဲ့သို့သောပုံမှန်မဟုတ်သောပတ်ဝန်းကျင်တွင်မသုံးပါနှင့်.
3. ကျေးဇူးပြု. ဘက်ထရီအခန်းနှင့်သတ္တု shrapnel area ရိယာကိုသန့်ရှင်းအောင်ထားပါ.
4. ကျေးဇူးပြုပြီးဝေးလံခေါင်ဖျားပြီးကျသွားခြင်းကြောင့်ဝေးလံခေါင်သီသောထိန်းချုပ်မှုကိုမထိခိုက်ပါနှင့်.
5. အချိန်ကြာမြင့်စွာမသုံးလျှင်, ကျေးဇူးပြု. ဘက်ထရီကိုဖယ်ရှားပြီးအဝေးထိန်းခလုတ်နှင့်ဘက်ထရီကိုသန့်ရှင်းစွာထားပါ
နှင့်လုံခြုံသောနေရာ.
6.သိုလှောင်မှုနှင့်သယ်ယူပို့ဆောင်ရေးစဉ်အတွင်း, အာရုံစူးစိုက်မှုကိုအစိုဓာတ်နှင့်ထိတ်လန့်ခုခံမှပေးဆောင်ရပါမည်.
10. လုံခြုံမှုသတင်းအချက်အလက်
1. operating မှကျွမ်းကျင်သူများမဟုတ်သောပညာရှင်များကိုအသုံးမပြုခင်ညွှန်ကြားချက်များကိုဂရုတစိုက်ဖတ်ပါ.
2. ကျေးဇူးပြုပြီးဘက်ထရီကိုအချိန်မီအစားထိုးပါ။
မလုံလောက်ပါဝါ, အရာဝေးလံခေါင်ဖျား control ကိုလုပ်ကိုင်နိုင်ခြင်းမရှိခြင်းဖြစ်နိုင်သည်.
3. ပြုပြင်ရန်လိုအပ်လျှင်, ကျေးဇူးပြုပြီးထုတ်လုပ်သူကိုဆက်သွယ်ပါ. ပျက်စီးဆုံးရှုံးမှုကိုယ့်ကိုကိုယ်ပြုပြင်ခြင်းကြောင့်ဖြစ်ရတဲ့အခါ, ထုတ်လုပ်သူ
အာမခံပေးမည်မဟုတ်.