ဖေါ်ပြချက်
1. ထုတ်ကုန်နိဒါန်း
တွားသွားယာဉ်ကြိုးဖြတ်ခြင်း အော်တိုဖြတ်တောက်ခြင်း အဝေးထိန်းခလုတ်သည် crawler ကြိုးမြင်ဖြတ်စက်များအတွက် သင့်လျော်သည်။. ၎င်းသည် 485ModbusRTU ပရိုတိုကောကို လက်ခံပြီး အမြန်နှုန်းစတင်ခြင်းနှင့် ရှေ့နှင့်အနောက် ဘယ်နှင့်ညာ လမ်းကြောင်းကို ထိန်းချုပ်ရန် ဘယ်နှင့်ညာ crawler inverters, အမြန်နှုန်းစတင်ခြင်းနှင့် အရှေ့နှင့် အနောက် ဘယ်ညာ လမ်းညွှန်ထိန်းချုပ်မှုအား ထိန်းချုပ်ရန် ကြီးမားသော မော်တာကြိမ်နှုန်းပြောင်းလဲခြင်း RTU ပရိုတိုကော၊, နှင့် ကြီးမားသော မော်တာ ကြိမ်နှုန်းပြောင်းလဲခြင်း- လက်ရှိ ခွဲခြမ်းစိတ်ဖြာခြင်းနှင့် နှိုင်းယှဉ်ခြင်း။, အလိုအလျောက်ဖြတ်တောက်ခြင်းလုပ်ဆောင်ချက်ကိုရရှိရန် ဘယ်နှင့်ညာဘက် crawler အမြန်နှုန်းများကို အချိန်နှင့်တပြေးညီ အလိုအလျောက်ချိန်ညှိပါ။.
2. ထုတ်ကုန်အင်္ဂါရပ်များ
1. 433mhz ကြိုးမဲ့ဆက်သွယ်ရေးနည်းပညာကိုချမှတ်ပါ, ကြိုးမဲ့စစ်ဆင်ရေးအကွာအဝေးဖြစ်ပါတယ် 100 မီတာ.
2. အလိုအလျောက်အကြိမ်ရေကိုလက်ခံခြင်း function ကိုချမှတ်ပါ, အသုံးပြု 32 တစ်ချိန်တည်းမှာပင် ကြိုးမဲ့အဝေးထိန်းကိရိယာအစုံ, တစ် ဦး ချင်းစီကတခြားထိခိုက်ခြင်းမရှိဘဲ.
3. 485-Modbus RTU ပရိုတိုကောဖြင့် အင်ဗာတာအားလုံးကို ပံ့ပိုးပါ။. အဆင်ပြေအောင်ပြုလုပ်ထားသော အင်ဗာတာအမှတ်တံဆိပ်များ ပါဝင်သည်။:ရှန်ဟိုင်း Xielin, ဖူဂျီ, ဆန်းသစ်တီထွင်မှု, zhongchen, ရေှာင့်မေှးအင်္ဂါ, Anchuanda. အမှတ်တံဆိပ်သည် ada မဟုတ်ပါက စိတ်ကြိုက်ပြင်ဆင်ရန် ကျွန်ုပ်တို့ထံ ဆက်သွယ်ပါ။.
4. ကြီးမားသော မော်တာ အင်ဗာတာ စတင်မှုကို ပံ့ပိုးပါ။, မြန်နှုန်းစည်းမျဉ်း, နှင့်လက်ရှိစာဖတ်ခြင်း။.
5. ဘယ်ညာ crawler အင်ဗာတာ အမြန်နှုန်း စည်းမျဉ်းကို ပံ့ပိုးပါ။, စတင်ပါ။, ရှေ့နှင့်နောက် ဘယ်ညာ ထိန်းချုပ်မှု.
6. စက်သည် မျဉ်းဖြောင့်အတိုင်း ရွေ့လျားနေစေရန် ဘယ်ညာ crawler အင်ဗာတာ မျဉ်းဖြောင့်တည့်မတ်မှုကို ပံ့ပိုးပါ။.
7. ထောက်ကြိုးသည် အလိုအလျောက်ဖြတ်တောက်ခြင်း လုပ်ဆောင်ချက်ကို မြင်သည်။, ကြီးမားသောမော်တာလက်ရှိအချက်အလက်အရ ဘယ်ညာ crawler speed ကို အချိန်နှင့်တပြေးညီ အလိုအလျောက်ချိန်ညှိပါ။.
8. တစ်ချိန်တည်းမှာ, မော်တာ၏စတင်ခြင်းနှင့်ရပ်တန့်ခြင်းကိုထိန်းချုပ်ရန်တိုက်ရိုက် IO အထွက်နှင့်သဟဇာတဖြစ်သည်။, မော်တာအမြန်နှုန်းကိုထိန်းချုပ်ရန် analog ဗို့အားအထွက်နှင့်.
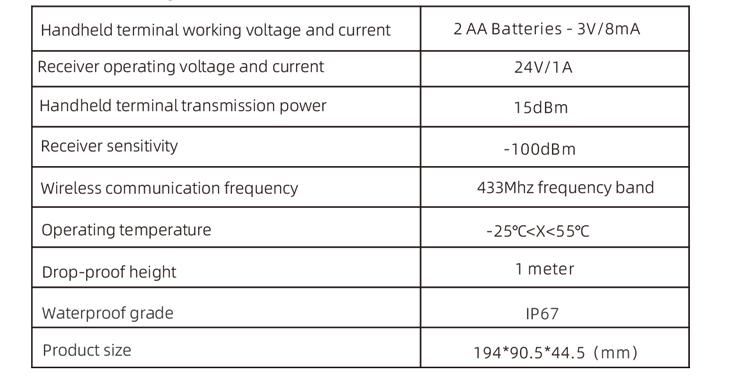
3. ထုတ်ကုန်သတ်မှတ်ချက်များ
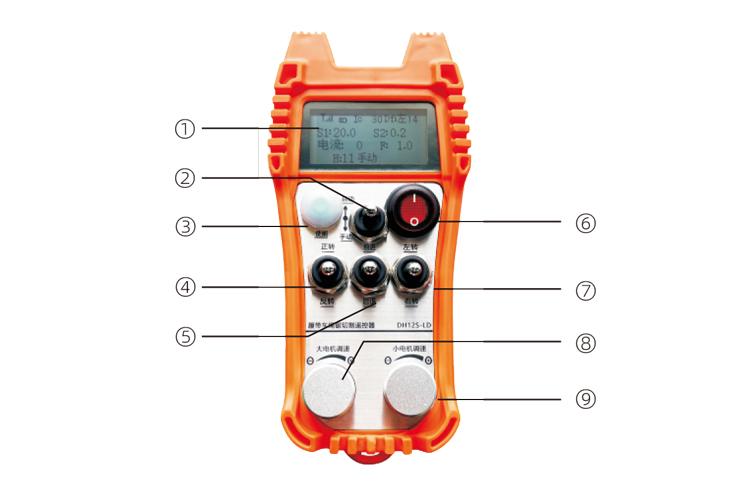
4. ထုတ်ကုန် function ကိုမိတ်ဆက်ခြင်း
မှတ်စုများ:
①screen display ကို:

②mode switch ကို:
အဆင့် 2 ခလုတ်ကို အသုံးပြုခြင်း။, အလိုအလျောက်နှင့် လက်စွဲမုဒ်များအကြား ပြောင်းနိုင်သည်။, နှင့်ပြောင်းခြင်းအတွက် သက်ဆိုင်ရာမုဒ်ကို မျက်နှာပြင်ပေါ်တွင် ပြသမည်ဖြစ်သည်။.
③ ဖွင့်ပါ။:
ပေါင်းစပ်ခလုတ်များ, အချို့သောစစ်ဆင်ရေးများသည်စစ်ဆင်ရေးအတွက် Enable ခလုတ်ကိုဖိထားရန်လိုအပ်သည်, အသေးစိတ်အတွက် switch တစ်ခုစီအတွက် ညွှန်ကြားချက်များကို ဖတ်ရှုပါ။.
④ ကြီးမားသော မော်တာခလုတ်:
3-speed reset switch ကိုသုံးခြင်း, ဤ switch ကိုဆွဲထုတ်ခြင်းသည်ကြီးမားသောမော်တာ၏ရှေ့သို့နှင့်ပြောင်းပြန်လည်ပတ်မှုကိုထိန်းချုပ်နိုင်သည်. ထုတ်လွှတ်ပြီးနောက်, ပြည်နယ်ဆက်လက်တည်ရှိလိမ့်မည်, နှင့်မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်. t မြှားသည် ရှေ့လှည့်ခြင်းကို ညွှန်ပြသည်။, y မြှားသည် နောက်ပြန်လှည့်ခြင်းကို ညွှန်ပြသည်။.
⑤smallမော်တာရှေ့ forward / ပြောင်းပြန် switch ကို:
3-speed self-locking switch ကိုအသုံးပြုခြင်း။, ဤခလုတ်ကိုဆွဲခြင်းဖြင့် ရှေ့နှင့်နောက်သို့ရွှေ့ရန် သေးငယ်သော မော်တာအား ထိန်းချုပ်နိုင်သည်။. သက်ဆိုင်ရာ display သည် မျက်နှာပြင်ပေါ်တွင် ပြသမည်ဖြစ်သည်။, ရှေ့သို့ညွှန်ပြသော t မြှားနှင့် နောက်သို့ညွှန်ပြသော ↓ မြှား.
⑥အဝေးထိန်းပါဝါခလုတ်:
Remote Control display မျက်နှာပြင်ကိုဖွင့်ထားသည်.
⑦ သေးငယ်သော မော်တာလှည့်ခလုတ်:
3-speed reset switch ကိုသုံးခြင်း, ကိုယ်တိုင်လည်ပတ်နေစဉ်, သေးငယ်သောမော်တာကိုဘယ်ဘက်သို့မဟုတ်ညာသို့လှည့်ရန်ထိန်းချုပ်နိုင်သည်. တစ်ချိန်ကဖြန့်ချိ, အဝေးထိန်းခလုတ်သည် ဤလုပ်ဆောင်ချက်ကို အလိုအလျောက်ရပ်တန့်သွားမည်ဖြစ်သည်။ ရှေ့သို့ရောက်ရှိနေချိန်တွင်, ဤခလုတ်ကိုဖွင့်လိုက်သည်နှင့် သက်ဆိုင်သည့်ပြကွက်သည် စခရင်ပေါ်တွင် ပေါ်လာလိမ့်မည်။ + ဘယ်ဘက်အကွေ့ကိုညွှန်ပြသောမြှား, နှင့် – မြှားသည် ညာဘက်အကွေ့ကို ညွှန်ပြသည်။ ပြောင်းပြန်မုဒ်တွင် ရှိနေသောအခါ, ဤခလုတ်ကိုဖွင့်လိုက်သည်နှင့် သက်ဆိုင်သည့်ပြကွက်သည် စခရင်ပေါ်တွင် ပေါ်လာလိမ့်မည်။ + ဘယ်ဘက်အကွေ့ကိုညွှန်ပြသောမြှား, နှင့် – မြှားသည် ညာဘက်အကွေ့ကို ညွှန်ပြသည်။ ဖွင့်ရန်ခလုတ်ကို နှိပ်ပြီး ဖိထားပါ။, ထို့နောက် ငုတ်တုတ်အလှည့်လုပ်ဆောင်ချက်ကို လုပ်ဆောင်ရန် ဤခလုတ်ကို လှည့်ပါ။, အလှည့်ကို ပိုမြန်စေတယ်။.
⑧ကြီးမားသောမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ:
Multi အလှည့် encoder fatob ကိုအသုံးပြုခြင်း, တိုင်းအတွက် ကြီးမားသော မော်တာ၏ အမြန်နှုန်း S1 ကိုချိန်ညှိရန် ခလုတ်ကို လှည့်ပါ။ 1 ဇယားကွက်လည်ပတ်မှု, ခန့်မှန်းခြေအားဖြင့်ကြီးမားသောမော်တာပြောင်းလဲမှုများ၏မြန်နှုန်းတန်ဖိုး 0.2 ယူနစ်, လျင်မြန်စွာလည်ပတ်ခြင်းသည် ကြီးမားသော မော်တာ၏ အမြန်နှုန်းတန်ဖိုးကို လျင်မြန်စွာ ပြောင်းလဲနိုင်သည်။.
9 သေးငယ်သောမော်တာအမြန်နှုန်းစည်းမျဉ်း (linear တည့်မတ်ခြင်း။):multi turn encoder ခလုတ်ကို အသုံးပြုရန်, manual mode မှာ, တိုင်းအတွက် 1 ခလုတ်၏အလှည့်, သေးငယ်သော မော်တာ၏ အမြန်နှုန်းတန်ဖိုးသည် ခန့်မှန်းခြေအားဖြင့် ပြောင်းလဲပါသည်။ 0.1 ယူနစ်. အမြန်လည်ပတ်ခြင်းသည် သေးငယ်သော မော်တာ၏ အမြန်နှုန်းတန်ဖိုးကို လျင်မြန်စွာ ပြောင်းလဲနိုင်သည်။.
အလိုအလျောက် mode မှာ, enable ခလုတ်ကိုနှိပ်ပြီးလှည့်ပါ။ 1 အချိန်တိုင်းဇယားကွက်. အသေးစား မော်တာ၏ အမြန်နှုန်းကန့်သတ်ချက်တန်ဖိုး F သည် ခန့်မှန်းခြေအားဖြင့် ပြောင်းလဲပါသည်။ 0.1 ယူနစ်. အရှိန်အဟုန်ဖြင့် လည်ပတ်ခြင်းသည် သေးငယ်သော မော်တာ၏ အမြန်နှုန်းကန့်သတ်တန်ဖိုးကို လျင်မြန်စွာ မွမ်းမံနိုင်သည်။ ဖွင့်ရန် ခလုတ်ကို နှိပ်ပါ။, ခလုတ်ကို ညာဘက်သို့ လှည့်ပါ။, မျဉ်းဖြောင့် တည့်မတ်မှု ပြကွက်သည် D f ကို ပြသသည်။: လက်ဝဲဘက်ဖြစ်သော. ခလုတ်၏လှည့်ခြင်းတစ်ခုစီသည်အားဖြင့်တိုးလာသည်။ 1 တခု; ဘယ်ဘက်ဖလားကိုလှည့်ပါ, ဖြောင့်လိုင်းပြင်ဆင်ချက်မျက်နှာပြင်: ခရု: မှန်သော. ခလုတ်၏လှည့်ခြင်းတစ်ခုစီသည်အားဖြင့်တိုးလာသည်။ 1 တခု, ပြုပြင်မှုယူနစ်တစ်ခုစီသည် မော်တာအမြန်နှုန်းထိန်းချုပ်မှုနှင့်ပတ်သက်၍ AVI ဗို့အားနှင့် သက်ဆိုင်သည်။ 0.02 v.
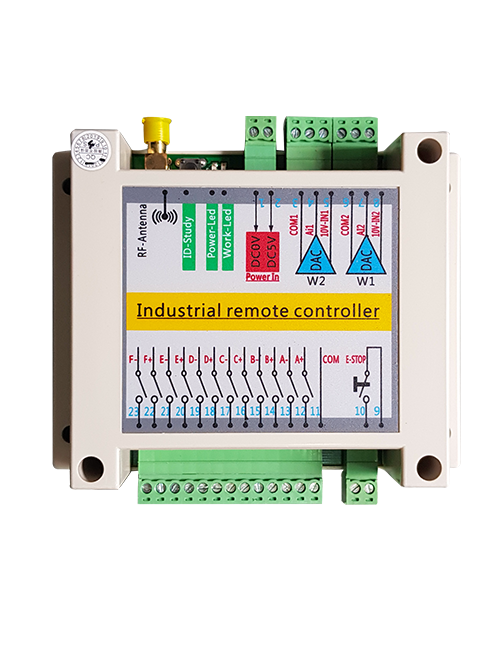
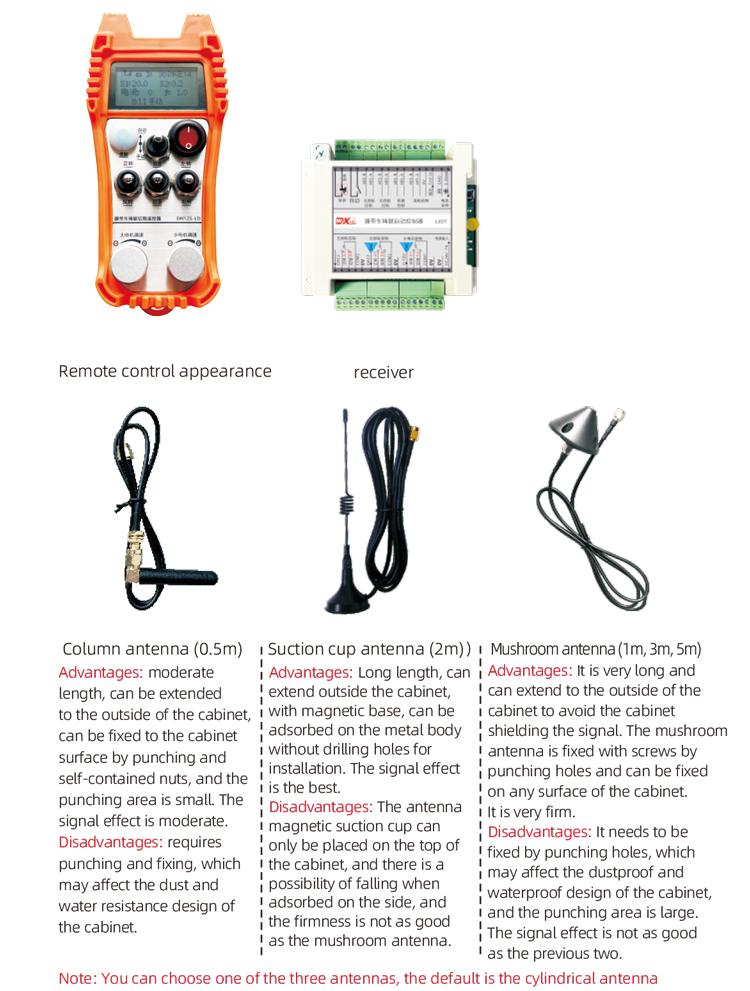
5. ထုတ်ကုန်ဆက်စပ်ပစ္စည်းပုံကြမ်း
6. ကုန်ပစ္စည်းတပ်ဆင်ခြင်းလမ်းညွှန်
6.1 ကုန်ပစ္စည်းတပ်ဆင်ခြင်းအဆင့်များ
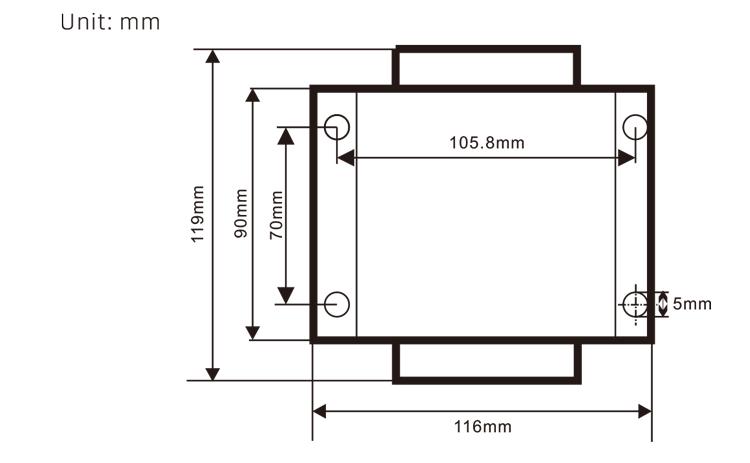
1. နောက်ကျောဘက်ရှိ သံဘောင်မှတဆင့် လျှပ်စစ်ပစ္စည်းလက်ခံကိရိယာကို တပ်ဆင်ပါ။, သို့မဟုတ် လက်ခံသူ၏လေးထောင့်ရှိ ဝက်အူအပေါက်များမှတစ်ဆင့် လျှပ်စစ်ဗီရိုတွင် ထည့်သွင်းပါ။.
2. ကျွန်ုပ်တို့၏ receiver ဝါယာကြိုးပုံကိုကြည့်ပါ, သင်၏ဆိုက်တွင် စက်ကိရိယာများကို နှိုင်းယှဉ်ပါ။, နှင့် စက်ပစ္စည်းများကို ဝိုင်ယာကြိုးများဖြင့် လက်ခံကိရိယာသို့ ချိတ်ဆက်ပါ။.
3. လက်ခံပြီးနောက် fixed သည်, လက်ခံသူနှင့်တပ်ဆင်ထားသောအင်တင်နာကိုချိတ်ဆက်ရမည်, နှင့်အင်တင်နာ၏အပြင်ဘက်အဆုံးကိုလျှပ်စစ်အဖွဲ့ပြင်ပတွင်တပ်ဆင်ထားရမည်သို့မဟုတ်နေရာချရမည်. ၎င်းကိုအကောင်းဆုံးသောကက်ဘိနက်၏ထိပ်ဆုံးတွင်ဖော်ပြရန်အကြံပြုသည်. အင်တာနာကို ချိတ်ဆက်မှုမရှိဘဲ ထားရန် သို့မဟုတ် အင်တာနာကို လျှပ်စစ်ဗီဒိုအတွင်း၌ ထားရန် တားမြစ်ထားသည်။, အချက်ပြမှု ညံ့ဖျင်းပြီး အသုံးမပြုနိုင်ပေ။.
4. နောက်ဆုံး, အဝေးထိန်းခလုတ်တွင် ဘက်ထရီကို တပ်ဆင်ပါ။, ဘက်ထရီအဖုံးတင်းကျပ်, ထို့နောက် အဝေးထိန်းခလုတ်၏ ပါဝါခလုတ်ကို ဖွင့်ပါ။. အဝေးထိန်းခလုတ်ကို ပြသပြီးနောက် ပုံမှန်အလုပ်လုပ်သည့် မျက်နှာပြင်ကို ပြသသည်။, သင်သည် အဝေးထိန်းခလုတ် လုပ်ဆောင်ချက်ကို လုပ်ဆောင်နိုင်သည်။.
6.2 celever installation dimensions
6.3 လက်ခံသူဝါယာကြိုးရည်ညွှန်းပုံ

7. ကုန်ပစ္စည်းစစ်ဆင်ရေးညွှန်ကြားချက်များ
7.1 Remote Control Parameter ချိန်ညှိချက်များ
အဝေးထိန်းကိရိယာ၏ နောက်ခံဘောင်များကို မည်သို့ထည့်သွင်းရမည်နည်း။: မုဒ်ကို manual mode သို့ပြောင်းပါ။, အသေးစားမော်တာ၏အမြန်နှုန်းကိုညှိပါ 25, သို့မဟုတ် 0, 10, 20, 40, 50, ကြီးမားသော မော်တာ၏ ရှေ့ခလုတ်ကို အထက်သို့ လှည့်ပါ။ 3 ကြိမ်နှင့်အောက် 3 ကေြှ;
သုံးပါ “အသေးစားမော်တာအမြန်ထိန်းချုပ်မှု” စာမျက်နှာကိုလှည့်ရန်ခလုတ်, ကန့်သတ်ချက်များကိုမွမ်းမံရန် Enable ကိုနှိပ်ပြီး သေးငယ်သော မော်တာအမြန်နှုန်းထိန်းချုပ်ခလုတ်ကို လှည့်ပါ။; ပြုပြင်မွမ်းမံပြီးနောက်, စာမျက်နှာကိုအဆုံးသို့လှည့်ပါ, Save and Exit ကိုရွေးပါ။, မီနူးမှ ထွက်ရန် Enable ခလုတ်ကို နှိပ်ပါ။;
အဆိုပါ parameters တွေကိုအောက်ပါအတိုင်းဖြစ်ကြသည်:အများဆုံးလက်ရှိ: ကြီးမားသော မော်တာ၏ လက်ရှိတုံ့ပြန်မှုတန်ဖိုး အပိုင်းအခြား, setting range 15-200A, ပျက်ကွက်ခြင်း 60;
မြန်နှုန်းထိန်းချုပ်မှု parameters တွေကို: အလိုအလျောက်မုဒ် သေးငယ်သော မော်တာ အလိုအလျောက် အရှိန်နှုန်း, ပိုမြန်သေးငယ်, ဆက်တင်အပိုင်း 200-1500, ပျက်ကွက်ခြင်း 1000;
deceleration parameter သည်: မော်တာအမြန်နှုန်းပြောင်းလဲမှု၏ အထက်ကန့်သတ်ချက်ကို သတ်မှတ်ခွင့်ပြုသည်။. ဒီတန်ဖိုးကိုကျော်လွန်လက်ရှိအပြောင်းအလဲများ, အရှိန်နှေးလိမ့်မည်။. သေးငယ်သည်, ဘယ်ညာ မော်တာတွေက ပိုမြန်လေလေ၊. အပိုင်းအခြားဖြစ်ပါ သည်။ 05-12, နှင့် ပုံသေဖြစ်သည်။ 06;
Accounteration A1: တန်ဖိုး ကြီးလေ, မော်တာအမြန်နှုန်းက ပိုမြန်လေပါပဲ။, အပိုင်း 00-06၊ မူရင်း 01; Deceleration A2: တန်ဖိုး ကြီးလေ, မော်တာအမြန်နှုန်းက ပိုမြန်လေလေ၊, အကွာအဝေး 00-06, ပျက်ကွက်ခြင်း 02;
မြန်နှုန်းစည်းမျဉ်းကိုဖွင့်ပါ: သေးငယ်သော မော်တာအမြန်နှုန်း စည်းမျဉ်းကို ဖွင့်ထားရန် လိုအပ်သည်။, 00 ဖွင့်မထားပါ။, 01 ဖွင့်ထားသည်။, ပျက်ကွက်ခြင်း 01;
ကိုယ်ပိုင်လော့ခ်ချခြင်း စတင်ပါ။: ရှေ့နှင့်ပြောင်းပြန်ခလုတ်ကို လွှတ်လိုက်ပြီးနောက် ကြီးမားသော မော်တာသည် အလိုအလျောက် လော့ခ်ကျသွားခြင်း ရှိ၊မရှိ၊, 00 မထိန်းသိမ်းထားပါဘူး။, 01 ထိန်းသိမ်းထားသည်။, ပျက်ကွက်ခြင်း 01;
အများဆုံးခရီးသွား: ဘယ်ညာ မော်တာများ၏ အမြင့်ဆုံးမြန်နှုန်း, အကွာအဝေး 10-100, ပျက်ကွက်ခြင်း 50;
လက်ရှိဖြတ်တောက်ခြင်း: အများဆုံးဖြတ်တောက်ခြင်းလက်ရှိ, မျက်နှာပြင်သည် IC တန်ဖိုးကိုပြသသည်။, အကွာအဝေး 15-160, ပျက်ကွက်ခြင်း 30, မျက်နှာပြင်သည် IC ကိုပြသသည်။: 30. ဤကန့်သတ်ချက်၏ အထက်ကန့်သတ်ချက် = အမြင့်ဆုံး လက်ရှိ x 80%;
ပုံမှန်မြန်နှုန်းကန့်သတ်ချက်: စတင်ချိန်တွင် ပုံသေ သေးငယ်သော မော်တာ အလိုအလျောက်ဖြတ်တောက်သည့် အမြန်နှုန်း, အကွာအဝေး 00-100, ပျက်ကွက်ခြင်း 10, မျက်နှာပြင်သည် F1.0 ကိုပြသသည်။, အမြင့်ဆုံးခရီးဟု သတ်မှတ်သောအခါမှသာ ဤကန့်သတ်ချက်သည် တိကျပါသည်။ 50.
ကြိုးမဲ့ချန်နယ်: ပုံသေဖြစ်ပါတယ်။ 10. အဝေးထိန်းအချက်ပြမှု မတည်မငြိမ်ဖြစ်သည့်အခါ သို့မဟုတ် ဆိုက်ပေါ်တွင် အချက်ပြနှောင့်ယှက်မှု ရှိနေသည့်အခါ, အနှောင့်အယှက်မဖြစ်စေရန် ချန်နယ်များပြောင်းရန် ဤကန့်သတ်ချက်ကို သင်မွမ်းမံနိုင်သည်။;
မြန်နှုန်းကန့်သတ်ကန့်သတ်: သေးငယ်သောမော်တာ၏အလိုအလျောက်ဖြတ်တောက်ခြင်းအမြန်နှုန်း၏အထက်ကန့်သတ်ချက်,အကွာအဝေး 00-200, ပျက်ကွက်ခြင်း 60, မျက်နှာပြင်ကိုပြသသည်။ 6.0; ပြသမှုတန်ဖိုး အထက်ကန့်သတ်ချက် = အမြန်နှုန်းကန့်သတ်ချက် အော့ဖ်ဆက် × 0.1;
အများဆုံးအိမ်ရှင်: ကြီးမားသောမော်တာ၏အမြင့်ဆုံးမြန်နှုန်း, အကွာအဝေး 10-100, ပျက်ကွက်ခြင်း 50;
Mbus ကိရိယာ ( အတင်းအကျပ်ဖြစ်သော ): ကြီးမားသော မော်တာ အင်ဗာတာ မော်ဒယ် ရွေးချယ်မှု, အကွာအဝေး 00-03, ပျက်ကွက်ခြင်း 03;
00- ရှန်ဟိုင်း Xielin 01 ဖူဂျီ
02- ရေှာင့်မေှးအင်္ဂါ 03 ဆန်းသစ်တီထွင်မှု (Zhongchen, ရရောို့လုံး
SBUS ပစ္စည်းကိရိယာများ (အတင်းအကျပ်ဖြစ်သော): အသေးစားမော်တာကြိမ်နှုန်း converter ကိုရွေးချယ်ခြင်း, အကွာအဝေး 00-05, ပျက်ကွက်ခြင်း 03;
00- ရှန်ဟိုင်း Xielin 01 ဖူဂျီ
02- ရေှာင့်မေှးအင်္ဂါ 03 ဆန်းသစ်တီထွင်မှု (Zhongchen, ရရောို့လုံး
04-roadchaanda 05-none
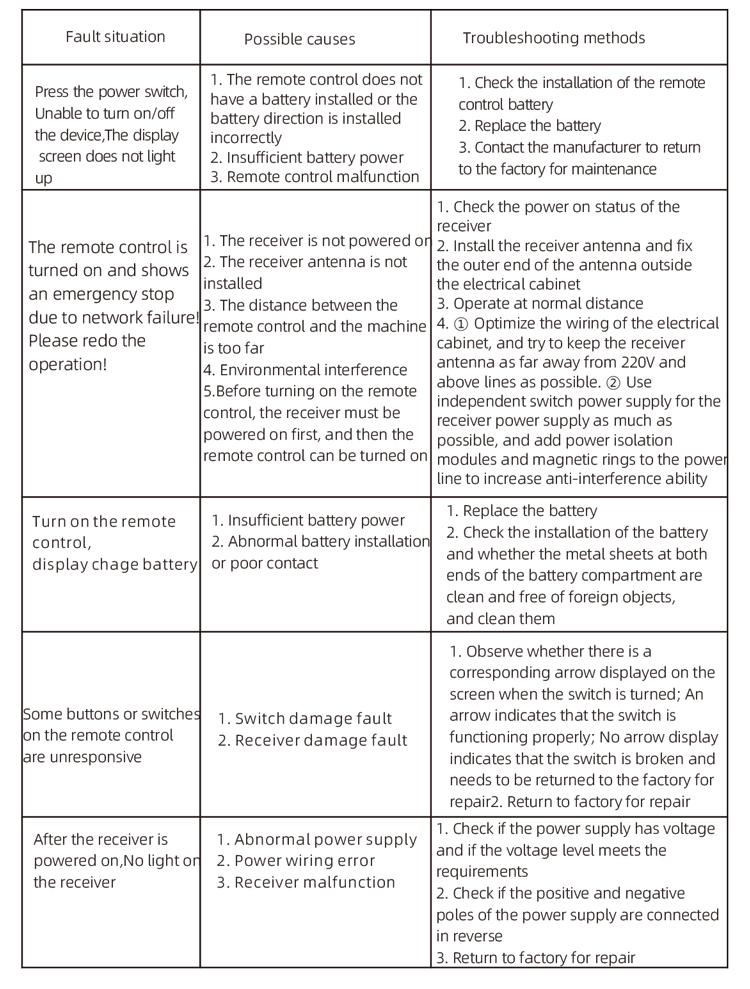
8. ထုတ်ကုန်ပြ troubl နာဖြေရှင်းခြင်း
7.2 ကြိမ်နှုန်း converterter parameterter setting ကို
1. Command Source Selection: ဆက်သွယ်ရေး command channel
2. အဓိကကြိမ်နှုန်းအရင်းအမြစ်ရွေးချယ်ခြင်း: ဆက်သွယ်ရေးပေးထားသည်
3. Baud Rate: 19200
4. ဒေတာပုံစံ: အတည်ပြုခြင်းမရှိပါ, ဒေတာပုံစံ<8-n-1>
5. ဒေသခံလိပ်စာ: လက်ဝဲကြိမ်နှုန်း converter ကိုသတ်မှတ်ပါ 1, မှန်ကန်သောကြိမ်နှုန်း converter 2, နှင့် ကြီးမားသော မော်တာ ကြိမ်နှုန်းပြောင်းပေးသည်။ 3
7.3 Remote Control စစ်ဆင်ရေးညွှန်ကြားချက်
1. စက်ပေါ်ပါဝါ, ဝေးလံခေါင်သီထိန်းချုပ်မှုအပေါ်လှည့်, အဝေးထိန်းခလုတ် နောက်ခံကို ရိုက်ထည့်ပါ။, အဝေးထိန်းခလုတ်နောက်ခံဘောင်များကို သတ်မှတ်ပါ။, အဓိကအားဖြင့် ၎င်းသည် အသေးစားနှင့် ကြီးမားသော မော်တာကြိမ်နှုန်း converters များ၏ မော်ဒယ်များကို သတ်မှတ်ရန်ဖြစ်သည်။ (စက်ထုတ်လုပ်သူက သတ်မှတ်ပြီးပါက ဤအဆင့်ကို ကျော်သွားပါ။);
2. ကြိမ်နှုန်း converterter ၏ parameters တွေကိုသတ်မှတ်ထားပါ (စက်ထုတ်လုပ်သူပြီးသားသတ်မှတ်ထားပါကဤအဆင့်ကိုကျော်ပါ);
3. Remote ထိန်းချုပ်မှုကို manual mode သို့သတ်မှတ်ပါ, ထို့နောက် စက်ကို အလုပ်လုပ်သည့် အနေအထားသို့ ရွှေ့ရန် အဝေးထိန်းခလုတ်ကို အသုံးပြုပါ။;
4. manual mode မှာ, ကြီးမားသောမော်တာ၏ဖြတ်တောက်ခြင်းလျှပ်စီးကြောင်းနှင့်ကြီးမားသောမော်တာ၏အမြန်နှုန်းအတွက် IC တန်ဖိုးကိုသတ်မှတ်ပါ။;
5. အလိုအလျောက် mode သို့ပြောင်းပြီးသေးငယ်တဲ့မော်တာအတွက်ဖြတ်တောက်ခြင်းကို cutting f တန်ဖိုးကိုသတ်မှတ်ပါ;
6. အလိုအလျောက် mode မှာ, ကြီးမားသောမော်တာကိုစတင်ရန်အတွက်ကြီးမားသောမော်တာခလုတ်ကိုဖွင့်ပါ, ထို့နောက် သေးငယ်သော မော်တာခလုတ်ကို ရှေ့သို့ပြောင်းပြန်သို့ လှည့်ပါ။. အဝေးထိန်းခလုတ်သည် အလိုအလျောက်ဖြတ်တောက်ခြင်းမုဒ်သို့ ဝင်ရောက်ပြီး ဖြတ်တောက်ခြင်းကို စတင်သည်။.
9.တည်မြဲစေခြင်း
1. ကျေးဇူးပြု. ၎င်းကိုအခန်းအပူချိန်တွင်ခြောက်သွေ့သောပတ် 0 န်းကျင်တွင် သုံး. ၎င်း၏ 0 န်ဆောင်မှုသက်တမ်းကိုတိုးချဲ့ရန်ဖိအားပေးပါ.
2. ကျေးဇူးပြုပြီး 0 န်ဆောင်မှုသက်တမ်းကိုတိုးချဲ့ရန်မိုးနှင့်ရေပူဖောင်းများကဲ့သို့သောပုံမှန်မဟုတ်သောပတ်ဝန်းကျင်တွင်မသုံးပါနှင့်.
3. ကျေးဇူးပြု. ဘက်ထရီအခန်းနှင့်သတ္တု shrapnel area ရိယာကိုသန့်ရှင်းအောင်ထားပါ.
4. ကျေးဇူးပြုပြီးဝေးလံခေါင်ဖျားပြီးကျသွားခြင်းကြောင့်ဝေးလံခေါင်သီသောထိန်းချုပ်မှုကိုမထိခိုက်ပါနှင့်.
5. အချိန်ကြာမြင့်စွာမသုံးလျှင်, ကျေးဇူးပြု၍ ဘက်ထရီကိုဖယ်ရှားပြီး အဝေးထိန်းခလုတ်နှင့် ဘက်ထရီကို သန့်ရှင်းလုံခြုံသောနေရာတွင် သိမ်းဆည်းပါ။.
6.သိုလှောင်မှုနှင့်သယ်ယူပို့ဆောင်ရေးစဉ်အတွင်း, အာရုံစူးစိုက်မှုကိုအစိုဓာတ်နှင့်ထိတ်လန့်ခုခံမှပေးဆောင်ရပါမည်.
10. လုံခြုံမှုသတင်းအချက်အလက်
1. operating မှကျွမ်းကျင်သူများမဟုတ်သောပညာရှင်များကိုအသုံးမပြုခင်ညွှန်ကြားချက်များကိုဂရုတစိုက်ဖတ်ပါ.
2. ကျေးဇူးပြု၍ ပါဝါမလုံလောက်ခြင်းကြောင့် ဖြစ်ပေါ်လာသော အမှားအယွင်းများကို ရှောင်ရှားရန် ဘက်ထရီအား အလွန်နည်းနေချိန်တွင် ဘက်ထရီအား အချိန်မီ အစားထိုးပါ။, အရာဝေးလံခေါင်ဖျား control ကိုလုပ်ကိုင်နိုင်ခြင်းမရှိခြင်းဖြစ်နိုင်သည်.
3. ပြုပြင်ရန်လိုအပ်လျှင်, ကျေးဇူးပြုပြီးထုတ်လုပ်သူကိုဆက်သွယ်ပါ. ပျက်စီးဆုံးရှုံးမှုကိုယ့်ကိုကိုယ်ပြုပြင်ခြင်းကြောင့်ဖြစ်ရတဲ့အခါ, ထုတ်လုပ်သူအာမခံပေးလိမ့်မည်မဟုတ်ပေ