Deskripshon
1.Modelo di produkto

Modelo: DH12S-P6S
Ekiponan aplikabel:mashin di zaag di waya/blade
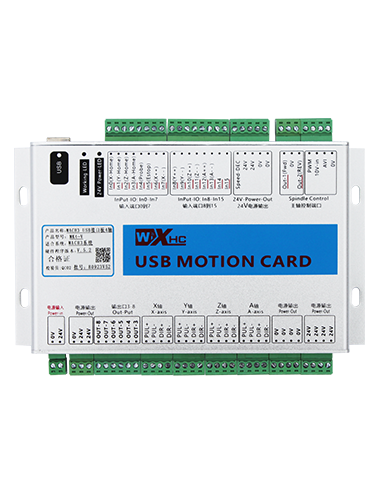
2.Diagram di asesorionan di produkto

Nota: Bo por skohe un di e tres antenanan .. E antena di succion ta standard pa default ..
3.Remoto deskripshon di switch di kòntròl

4.Introdukshon di kontenido di prueba

Velocidad di motor principal .: Prinsipal: 0-50
Velocidad di motor cu ta biaha: Liña: 0-50
Limite di velosidat máksimo di kòrtamentu outomatiko di motor di biahe: Velosidat: 0-30
(parameternan ahustabel)
Kortamentu di koriente di motor prinsipal di kòrtamentu outomátiko: Konfigurashon: 28 (parameternan ahustabel)
Swing velosidat di motor di brasa: Skòmel: 0-50

voltahe abou: E bateria di kòntròl remoto ta muchu abou ., por fabor reemplasa e bateria ..

Ret a baha: E señal sin kabel ta wòrdu interumpí .. Por fabor check e poder di e recibidor ., poder lo riba atrobe, e reinisia e kòntròl remoto ..
5.Remoto di kontrol di funshon di instrukshonnan
1(Bira riba e kòntròl remoto .
Ora e recibidor ta wordo alimenta riba ., e luz di coriente D2 riba e recibidor semper ta riba ., e luz di señal D1 ta cuminsa flash .; instala dos bateria AA den e kòntròl remoto ., bira riba e switch di koriente ., e display lo mustra e velocidad di motor ., indikándo startup eksitoso.
2(reglamento di motor y velocidad grandi/reglamento di velocidad .
Prensa e hold . “Reglamento di Velosidat Habilitá”, bira “Dilanti/Reverso” switch pa dilanti, e motor principal di e recibidor lo bira on .;
Prensa e hold . “Reglamento di Velosidat Habilitá”, bira “Dilanti/Reverso” switch pa reverse, e motor principal di e recibidor lo reverse y lo bira on .;Simplemente move e switch pa e direkshon meimei òf reverso ., e motor prinsipal lo para mesora sin primi e boton di kontrol di velosidat .;Rota e “motor grandi” knob pa ahusta e voltahe di regulashon di velosidat di e inverter prinsipal di e risibídó na 0-10V .;
3: Motor di biahe .
Prensa e hold . “Ahustashon di Velosidat Habilitá”, bira “Dilanti/Reverso” switch pa dilanti òf patras, y e motor di cana lo move cu un velocidad halto di . 50;
4‼Regloracion di motor di brasa di brasa y velocidad di velocidad .
Bira e “Brasa di Swing/Reverso” switch pa swing brasa of retiro ., e motor di brasa di swing di e receiver ta cuminsa .; despues draai e . “Ahustashon di Velosidat” knob pa ahusta e velocidad di motor di brasa di swing .;
Prensa e hold . “Ahustashon di Velosidat Habilitá”, y despues hala e . “Brasa di Swing/Reverso” kambia, e motor di brasa di swing lo move cu un velocidad halto di . 50;
53ahustashon di límite di velosidat di motor .
Prensa y tene e “ahuste di velosidat ta permití” boton e draai e “ahuste di velosidat” pa ahusta e límite máksimo di velosidat di e motor ku ta biaha durante kòrtamentu outomatiko .;
6(Kotamentu outomátiko
E prome paso ta pa start e motor principal .; e di dos paso ta pa ahusta e limite maximo di velocidad di e motor di cana .; e di tres paso ta pa move e . “dilanti/inverso” kambia dilanti òf patras pa drenta e modo di kòrtamentu outomatiko .;
73 Menu di parameter . (usuarionan ta prohibi di modifica esaki sin permiso .)
Introdusí e menú di parameter .:Den modo manual, ora cu e velocidad principal di e motor ta . 0, pusha e switch dilanti/reverso ariba tres biaha tras di otro, y despues pusha esaki abou tres biaha den un fila pa encamina e menu di parameter .;
Sali for di e menu di parameter .: Bira e knob di ahuste di velosidat ., selektá warda òf warda, e primi e boton di habilitá pa konfirmá .;
Agrupá aktualmente: E balor máksimo di e koriente di motor prinsipal ., unidat Ampere;
Parameternan di ahuste di velosidat .: Parameternan di kòntròl di kòrta outomátiko, standart 800, unidat mili di dos,modifikashon ta prohibí;
Parameter di desacelerashon: Ora e balor di kambio di koriente di kòrtamentu ta surpasá e balor aki ., desacelerashon rápido ta kuminsá ., unidat Ampere;
Aceleracion a1.: Ora e koriente di kòrta ta mas abou ku e koriente di kòrtamentu di set ., e balor di velocidad a aumenta cu cada aceleracion di e motor di cana .;
Deselerashon a2.: Ora e koriente di kòrta ta mas haltu ku e koriente di kòrtamentu di set ., e balor di velosidat redusí dor di kada desacelerashon di e motor di kana .;
Swing actual di brasa: Balor predeterminá, modifikashon ta prohibí;
Stòp di tempu: Despues di e modo outomatiko di koriente di overload shut, e coriente lo wordo detecta atrobe despues di un periodo di tempo .. Si e ta menos cu e coriente set ., e motor di kanamentu lo kuminsá outomatikamente .; unidat di dos, balor predeterminá, modifikashon ta prohibí;
Koriente máksimo: E rango di koriente di feedback motoriko prinsipal ., unidat Ampere;
Ehérsito máksimo: Remoto di kòntròl di ahuste prinsipal di velosidat di display di rango di .;
Kaminata máksimo: Parameter inválido .;
Ofisina di límite di velosidat: Durante kòrtamentu outomatiko, e límite di velosidat di kana di kanamentu di kòntròl remoto = . 50% di e parameter aki .;
Aumento di sensibilidad: Ora e koriente prinsipal di retroalimentashon di motor ta oumentá ., cada biaha e aumento ta surpasa e balor aki ., e motor di kana ta aselerá .;
Disminuí sensibilidat: Ora e koriente di feedback di e motor prinsipal ta baha ., y cada biaha e balor bahando ta surpasa e balor aki ., e motor di kana ta desacelerá .;
Kongunta di sensibilidat: Agregá i kita e oumento di offset di e parameter di sensibilidat .;
fihá aktual: Kortamentu outomátiko, e drempel di koriente prinsipal di feedback di motor. Si e balor aki wordo surpasa .,e motor di kana ta kuminsá desacelerá .;Bou di e balor aki ., e motor di camina ta cuminsa acelera .;unidat: Ampere;
Sali for di salida: Ora e modo outomatiko kuminsá, si e koriente prinsipal di feedback di motor ta ménos ku e balor aki .,e lo ta den e modo di idling.Si ta mayortano e balor aki, lo sali for di e modo di idling i introdusí e modo di kòrta.Unidat ta ampera .;
No-karga aktual:Ora e modo outomatiko kuminsá, si e koriente prinsipal di feedback di motor ta ménos ku e balor aki .,e ta den modo di no-carga.Si ta mayortano e balor aki ., lo sali for di e modo di no-karga i introdusí e modo di kòrta.Unidat ta Ampere .;
Velocidad di brasa swing: Velosidat inisial di motor di brasa di swing ora di start up;
Modo di corta: Cambia entre e modonan di zaag di blade y waya ., y e parameternan lo cambia di acuerdo despues di e switch .; den modo di zaag blade, e pantaya di kòntròl remoto ta agregá un motor di brasa di swing ., mientras cu den modo di zaag ., no tin motor di brasa di swing .;
Debuntuá tempu: Ora e koriente prinsipal di feedback di motor surpasá e koriente di parada ., e koriente di feedback lo wòrdu detektá kontinuamente .. E tempu di debonk ta e durashon di e detekshon kontinuo aki.Despues di e tempu aki, si e koriente di motor prinsipal tòg ta surpasá e koriente di parada ., e motor di camina lo stop .;sino, e motor di camina lo stop .. E motor lo sigui bai;
Stòp aktual: E koriente prinsipal di feedback di motor ta surpasá e balor aki ., y e motor di camina lo stop .;Unidad ta Ampere;
Inkumplimentu di default: E balor inisial di e límite di velosidat di motor di kana ora e remote kòntròl ta sende = 50% di e balor aki;
6.Karakterístika eléktriko di kòntròl remoto

7.Remoto tamaño di kòntròl

E derecho di interpretashon final di e produkto aki ta pertenesé solamente na nos kompania ..