وضاحت
1. پيداوار جو تعارف
ڪريلر گاڏي رپي کي پاڻمرادو ڪٽڻ وارو ڪنٽرول ڏٺو ويو آهي جيڪو ڪرسلر رسي کي ڪٽڻ واري مشين لاء مناسب آهي. اهو 485modbustu Protocl کي اختيار ڪري ٿو ته رفتار ۽ کاٻي پاسي ۽ کاٻي پاسي ۽ کاٻي پاسي ۽ سا right ي طرف واري کاٻي ۽ سا right ي طرف واري پاسي ۽ صحيح طرفي ڪنٽرول, انهي سان گڏ وڏي موٽر فريڪوئنسي تبديلي RTU پروٽوڪول کي ڪنٽرول ۽ کاٻي ۽ سا right ي طرف ۽ سا right ي طرف ۽ سا right ي طرف واري کاٻي پاسي ۽ سا right ي طرف واري کاٻي پاسي, ۽ وڏي موٽر فريڪوئنسي تبديلي موجوده تجزيو ۽ مقابلي ۾, خودڪار طريقي سان کاٻي ۽ سا cravler و ڪريلر جي رفتار کي پاڻمرادو ڪٽڻ واري فنڪشن حاصل ڪرڻ لاء ترتيب ڏيو.
2. پيداوار خاصيتون
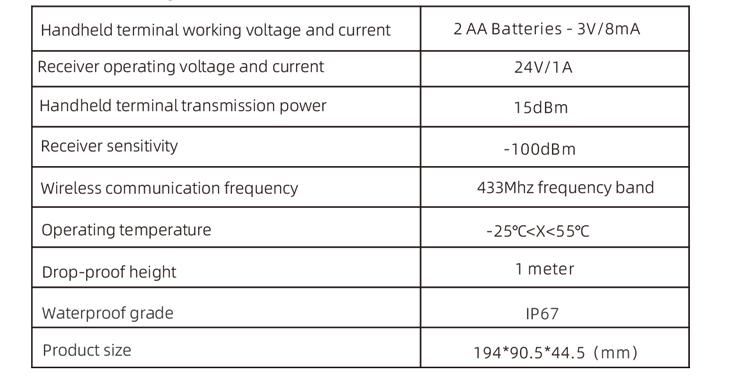
1. 433mhz وائرلیس مواصلات ٽيڪنالاجي کي اپنائڻ, وائرليس آپريشن جو مفاصلو آهي 100 وارا.
2. خودڪار فریکوئنسي هپنگ فنڪشن کي اختيار ڪيو, استعمال ڪريو 32 وائرليس ريموٽ ڪنٽرولرز جو سيٽ هڪ ئي وقت تي, هڪ ٻئي کي متاثر ڪرڻ کانسواء.
3. 485-Modbus RTU پروٽوڪول سان سڀني انڊرٽرز کي سپورٽ ڪريو. انڊرٽر برانڊ جيڪي شامل ڪيا ويا آهن:شنگھائي زينلن, فوجي, انشورنس, زونگچن, دعوت ڏيو, انچونڊا. جيڪڏهن برانڊ ايڊا نه آهي مهرباني ڪري اسان سان حسب ضرورت لاء رابطو ڪريو.
4. وڏي موٽر انڊرٽر شروعات جي حمايت ڪريو, اسپيڊ ريگيوليشن, ۽ موجوده پڙهائي.
5. سپورٽ کاٻي ۽ سا crawler ي ڪوررر اسپيڊ ريگيوليشن ريگيوليشن, شروع ڪيو, اڳيان ۽ پوئتي کاٻي ۽ صحيح ڪنٽرول.
6. کاٻي ۽ سا cravaler ي ڪرورر انڊرٽر سڌي لائين کي سڌي لائين ۾ منتقل ڪرڻ جي سپورٽ ڪريو.
7. سپورٽ رسي پاڻمرادو ڪٽڻ واري فنڪشن کي ڏٺو, پنهنجي پاڻمرادو موٽر موجوده معلومات جي مطابق اصل وقت ۾ کاٻي ۽ سا cravler و ڪريلر جي رفتار کي پاڻمرادو ترتيب ڏيو.
8. ساڳئي وقت ۾, اهو سڌي طرح موٽر جي شروعات ۽ اسٽاپ کي روڪڻ لاء سڌو نقلي آئوٽ سان مطابقت رکي ٿو, ۽ موٽر اسپيڊ کي ڪنٽرول ڪرڻ لاء اينالاگ وولٽ آئوٽ.
3. پيداوار جون وضاحتون
4. مصنوعات جي فنڪشن تعارف
نوٽ:
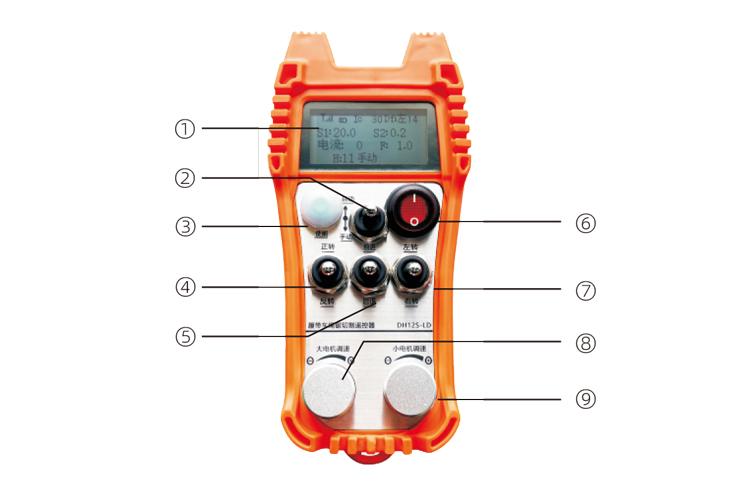
① اسڪرين ڊسپلي:

موڊ سوئچ:
2 ليول سوئچ استعمال ڪندي, اهو ممڪن آهي ته پاڻمرادو ۽ دستي طريقن جي وچ ۾ مٽجي, ۽ ساڳئي طريقي سان سوئچنگ لاء اسڪرين تي ظاهر ڪيو ويندو.
ان جي چڪاسن ڪري:
ميلاپ بٽڻ, ڪجهه آپريشن آپريشن لاء فعال بٽڻ کي دٻائڻ جي ضرورت آهي, تفصيل لاء هر سوئچ لاء مهرباني ڪري هدايتن جو حوالو ڏيو.
④ وڏي موٽر سوئچ:
3 اسپيڊ ريسٽ سوئچ استعمال ڪندي, هن سوئچ کي ڇڪڻ ۽ وڏي موٽر جي اڳتي وڌڻ ۽ ريورس گردش کي ڪنٽرول ڪري سگهي ٿو. ان کي جاري ڪرڻ کان پوء, رياست رهندي, ۽ اسڪرين تي مناسب نمائش هوندي. ٽي تير اڳتي وڌڻ جي گردش ڏانهن اشارو آهي, ۽ ي تير ريورس گردش کي ظاهر ڪري ٿو.
⑤small موٽر فارورڊ / ريورس سوئچ:
3 اسپيڊ خودڪشي سوئچ استعمال ڪندي, هن سوئچ کي ڇڪڻ لاء نن moto ي موٽر کي اڳتي وڌڻ ۽ پوئتي هلڻ لاء ڪنٽرول ڪري سگهي ٿو. ساڳئي ڊسپلي اسڪرين تي ڏيکاريندو, ٽي تيرن سان اڳتي وڌڻ ۽ تيرن کي اشارو ڪندي اشارو ڪندي.
⑥rimote ڪنٽرول پاور سوئچ:
ريموٽ ڪنٽرول ڊسپلي اسڪرين آن ڪئي وئي آهي.
⑦ نن mottle ي موٽر موٽر سوئچ:
3 اسپيڊ ريسٽ سوئچ استعمال ڪندي, جڏهن دستي طور تي هلندو آهي, نن moto ي موٽر کي کاٻي يا سا to ي طرف موڙڻ لاء ڪنٽرول ڪري سگهجي ٿو. هڪ دفعو آزاد ڪيو ويو, ريموٽ ڪنٽرول پاڻمرادو بند ٿي ويندو. جڏهن ته اڳتي واري رياست ۾, هن سوئچ کي موڙيو ۽ لاڳاپيل ڊسپلي اسڪرين تي ظاهر ٿيندو. + تير کاٻي پاسي جو اشارو ڏئي ٿو, ۽ سڀ – تير صحيح موڙ اشارو ڪري ٿو. ريورس موڊ ۾, هن سوئچ کي موڙيو ۽ لاڳاپيل ڊسپلي اسڪرين تي ظاهر ٿيندو. + تير کاٻي پاسي جو اشارو ڏئي ٿو, ۽ سڀ – تير صحيح موڙ تي اشارو ڪري ٿو ۽ چالو بٽڻ کي دٻايو, پوء هن سوئچ کي اسٽيشنري موڙيندڙ فنڪشن انجام ڏيڻ لاء turn يرايو, تڪڙو تڪڙو ڪرڻ.
⑧ وڏي موٽر اسپيڊ ريگيوليشن:
گھڻائي موڙيندڙ انڪوڊر نوب استعمال ڪندي, هر موٽر جي رفتار جي اسپيڊ ايس 1 جي اسپيڊ S1 کي ترتيب ڏيڻ لاء گھمايو 1 گرڊ گردش, تقريبن وڏي موٽر تبديلين جي رفتار تقريبن 0.2 يونٽ, ۽ تيز موٽر جي رفتار جي رفتار کي جلدي تبديل ڪري سگھن ٿا.
9 نن motter ي موٽر اسپيڊ ريگيوليشن (لڪير جي اصلاح):ملائي موڙيندڙ انڪوڊر ڪوب کي استعمال ڪرڻ لاء, دستي موڊ ۾, هر هڪ لاء 1 نوب جو رخ, تقريبا نن mottle ي موٽر تبديلين جي رفتار تقريبن 0.1 يونٽ. فاسٽ گردش جلد ئي نن moto ي موٽر جي رفتار جي قيمت کي تبديل ڪري سگھن ٿا.
خودڪار موڊ ۾, فعال بٽڻ کي دٻايو ۽ گھمايو 1 هر ڀيري گرڊ. تقريبن موٽر تبديلين جي تيز موٽر تبديلين جي رفتار جي حد 0.1 يونٽ. تيز موٽر جي رفتار جي رفتار جي رفتار جي قيمت کي جلدي تبديل ڪري سگھي ٿو. فعال بٽڻ کي فعال ڪريو, نوب کي سا to ي طرف موڙيو, ۽ سڌي لائين سڌاريل ڊسپلي ڏيکاري ٿي ڊي ايف: کاٻو. نب جي هر گردش وڌندي آهي 1 يونٽي پي; کاٻي پاسي واري نوب کي, سڌي لائين سڌاريل ڊسپلي: ڊي اين D: ساڄو. نب جي هر گردش وڌندي آهي 1 يونٽي پي, ۽ هر اصلاح يونٽ هڪ موٽر اسپيڊ ڪنٽرول ايوي وولٽ جي برابر آهي 0.02 V.
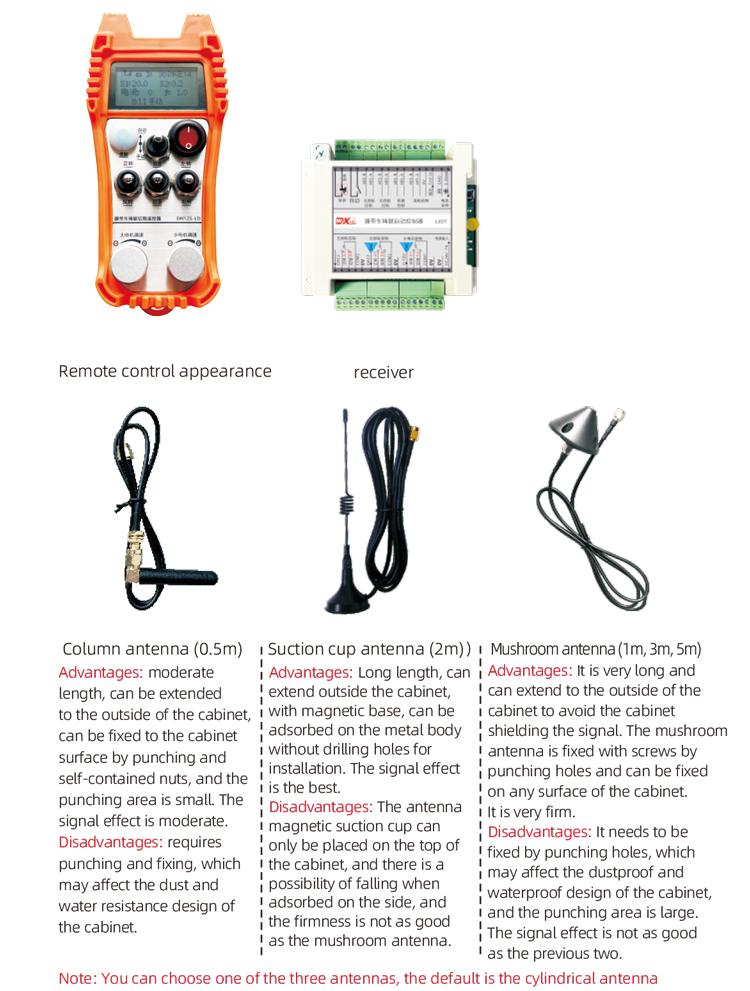
5. پروڊڪٽ جي رسائي واري خاڪي
6. پروڊڪٽ انسٽاليشن گائيڊ
6.1 پروڊڪٽ انسٽاليشن جا قدم
1. بيڪ تي بڪلي ڪابينا کي بیکل ذريعي واپس وٺو, يا وصول ڪندڙ جي چئن ڪنڊن تي اسڪيم جي سوراخ ذريعي برقي ڪيبنٽ ۾ ان کي انسٽال ڪريو.
2. اسان جي رسيور وائرنگ ڊاگرم جو حوالو ڏيو, توهان جي آن سائيٽ جو سامان جو مقابلو ڪريو, ۽ سامان کي وائرس ذريعي رسيور کي ڳنيو.
3. وصول ڪندڙ کي طئي ڪرڻ بعد, اينٽينا وصول ڪندڙ سان ليس آهي, ۽ اينٽينا جو ٻاهرين اختتام لازمي طور تي انسٽال ڪيو ويو آهي يا بجليء واري ڪابينا کان ٻاهر رکيل آهي. اهو انهي کي بهترين سگنل اثر لاء برقي ڪيبنٽ تي رکڻ جي لاء سفارش ڪئي وئي آهي. اهو اينٽينا کي ڇڏي ڏيڻ کان منع ڪيو ويو آهي ته برقي ڪابينا جي اندر اينٽينا کي ڇڏي ڏيو, جيڪو شايد غريب سگنل ۽ ناقابل استعمال آهي.
4. آخرڪار, ريموٽ ڪنٽرول ۾ بيٽري انسٽال ڪريو, بيٽري جو احاطو ڪيو, ۽ پوء ريموٽ ڪنٽرول جي پاور سوئچ کي آن ڪيو. ريموٽ ڪنٽرول ڊسپلي بعد عام ڪم ڪندڙ انٽرفيس کي ڏيکاري ٿو, توهان ريموٽ ڪنٽرول آپريشن ڪري سگهو ٿا.
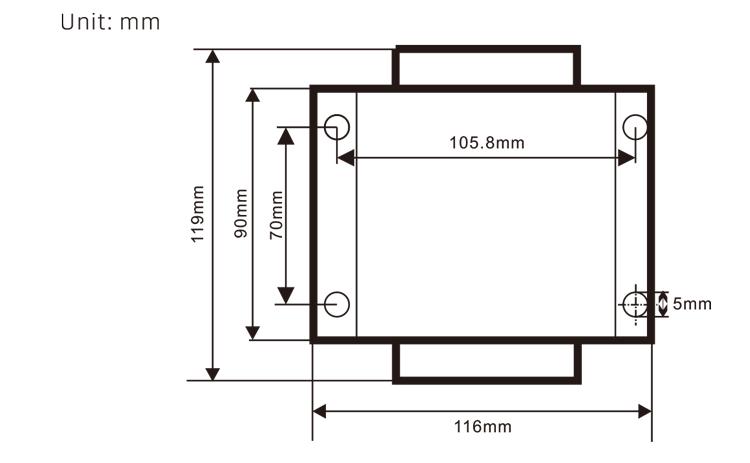
6.2 وصول ڪندڙ جي انسٽاليشن جي ماپ
6.3 وصول ڪندڙ وائرنگ ريفرنس ڊاگرام

7. مصنوعات جي آپريشن جون هدايتون
7.1 ريموٽ ڪنٽرول پيٽرولر سيٽنگون
ريموٽ ڪنٽرولر جي پس منظر واري پيراگراف ۾ ڪيئن داخل ڪجي: دستي موڊ ڏانهن موڊ سوئچ کي موڙيو, نن moto ي موٽر جي رفتار کي ترتيب ڏيو 25, يا مان 0, 10, 20, 40, 50, ۽ وڏي موٽر جي مٿي جي اڳيان واري سوئچ کي موڙيو 3 ڀيرا ۽ هيٺيون 3 ڀيرا;
استعمال ڪريو “نن M موٽر اسپيڊ ڪنٽرول” صفحو to يرائڻ لاء, پريس ڪريو ۽ نن motter ن موٽر اسپيڊ ڪنٽرول ڪنٽرول کي تبديل ڪرڻ لاء پيٽرولن کي تبديل ڪرڻ لاء; ترميم کان پوء, صفحي کي آخر تائين موڙيو, محفوظ ڪريو ۽ نڪرڻ, ۽ مينيو مان نڪرڻ لاء چالو بٽڻ کي دٻايو;
پيرا ميٽرز هن ريت آهن:وڌ کان وڌ موجوده: وڏي موٽر موجوده راء واري قيمت جي حد, 15-200a جي حد تائين ترتيب ڏيڻ, ڊفالٽ 60;
رفتار ڪنٽرول پيراگراف: خودڪار موڊ نن motter ڙي موٽر خودڪشي تيز رفتار رفتار, ننڙو تيز, حد تائين ترتيب ڏيڻ 200-1500, ڊفالٽ 1000;
فريب پيرا ميٽر: موٽر اسپيڊ تبديلي جي مٿين حد کي ترتيب ڏيو. جڏهن هن قيمت کان ٻاهر موجوده تبديليون, اهو ٺڳي ڪندو. ننڙو اهو آهي, کاٻي ۽ سا right ي موٽر کي تيز ڪيو ويندو. حد آهي 05-12, ۽ ڊفالٽ آهي 06;
ايڪليشن اي 1: وڏي قيمت, موٽر جي رفتار وڌائي ٿي, 00-06، ڊفالٽ 01; فريب A2: وڏي قيمت, موٽر اسپيڊ کي تيز رفتار گهٽجي ٿو, حد 00-06, ڊفالٽ 02;
اسپيڊ ريگيوليشن کي فعال ڪريو: ڇا نن M موٽر اسپيڊ ريگيوليشن کي فعال ڪرڻ جي ضرورت آهي, 00 فعال نه آهي, 01 فعال آهي, ڊفالٽ 01;
شروعاتي خودڪشي: آيا وڏي موٽر پاڻمرادو پنهنجو پاڻ کي اڳتي وڌڻ ۽ ريورس سوئچ جاري ٿيڻ بعد جاري رکندي, 00 برقرار نه آهي, 01 برقرار رکيو ويو آهي, ڊفالٽ 01;
وڌ کان وڌ سفر: کاٻي ۽ سا مودارن جي وڌ ۾ وڌ رفتار, حد 10-100, ڊفالٽ 50;
موجوده ڪٽڻ: وڌ کان وڌ ڪٽڻ, اسڪرين IC ويليو ڏيکاري ٿو, حد 15-160, ڊفالٽ 30, اسڪرين IC ڏيکاري ٿو: 30. هن پيٽرولر جي مٿين حد = وڌ ۾ وڌ موجوده ايڪس 80%;
ڊفالٽ رفتار جي حد: شروعاتي نن mottle ڙي موٽر خودڪشي واري رفتار شروع ٿي چڪي آهي, حد 00-100, ڊفالٽ 10, اسڪرين ڏيکاري ٿو F1.0, اهو پيٽرولر صرف صحيح آهي جڏهن وڌ ۾ وڌ سفر مقرر ڪيو وڃي 50.
وائرليس چينل: ڊفالٽ آهي 10. جڏهن ريموٽ ڪنٽرول سگنل غير مستحڪم آهي يا سائيٽ تي سگنل مداخلت آهي, توهان مداخلت کان بچڻ لاء چينلز کي تبديل ڪرڻ لاء هن پيراگراف کي تبديل ڪري سگهو ٿا;
رفتار جي حد آفسيٽ: نن moto ي موٽر جي پاڻمرادو ڪٽڻ واري رفتار جي مٿين حد,حد 00-200, ڊفالٽ 60, اسڪرين ڏيکاري ٿو 6.0; ڊسپلي ويليو جي مٿين حد = اسپيڊ حد آفسيٽ × 0.1;
وڌ کان وڌ ھائو: وڏي موٽر جي وڌ ۾ وڌ رفتار, حد 10-100, ڊفالٽ 50;
ايم بي اي ڊوائيس ( لازمي ): وڏي موٽر انڊرٽر ماڊل چونڊ, حد 00-03, ڊفالٽ 03;
00- شنگھائي زينلن 01 فوجي
02- دعوت ڏيو 03 انضمام (زونچن, رابون)
ايس بيس جو سامان (لازمي): نن Mot ي موٽر فريڪوئنسي ڪنورٽر ماڊل چونڊ, حد 00-05, ڊفالٽ 03;
00- شنگھائي زينلن 01 فوجي
02- دعوت ڏيو 03 انضمام (زونچن, رابون)
04-اينچنڊا 05 - ڪوبه نه
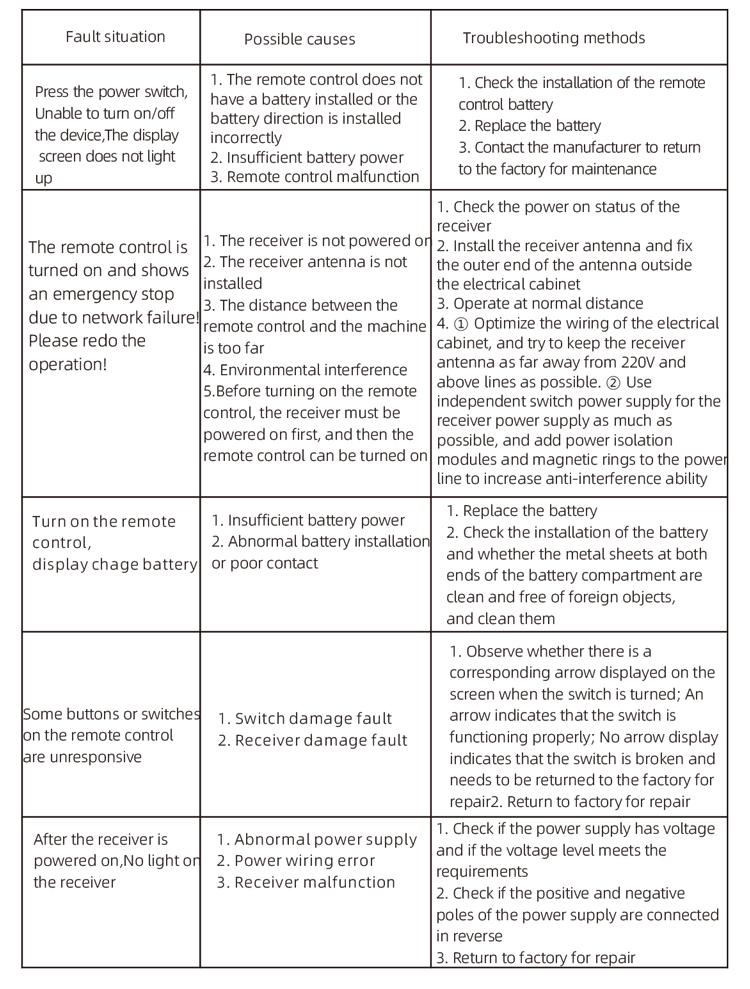
8. پيداوار جي تڪليف
7.2 فريڪوئنسي ڪنورٽر جي پيمرا جوڙجڪ
1. ڪمانڊ ماخذ چونڊ: ڪميونيڪيشن ڪمانڊ چينل
2. مکيه تعدد جو ذريعو چونڊ: ڳالھ ٻولا
3. ڪڏهن جي شرح: 19200
4. ڊيٽا ميپت پن: ڪا رقم ڪان, ڊيٽا ميپت پن<8-ن -1>
5. مقامي جو پتو: کاٻي فريڪئنسي ڪنوينٽر کي سيٽ ڪريو 1, صحيح فريڪوئنسي ڪنورر ڏانهن 2, ۽ وڏي موٽر فريڪوئنسي ڪنورٽر ڏانهن 3
7.3 ريموٽ ڪنٽرول آپريشن جون هدايتون
1. مشين تي طاقت, ريموٽ ڪنٽرول کي کوليو, ريموٽ ڪنٽرول پس منظر ۾ داخل ٿيو, ريموٽ ڪنٽرول پسمنظر جي پيراگراف کي سيٽ ڪريو, بنيادي طور تي نن and ي ۽ وڏي موٽر فريڪئنسيئنز جي تبديلين جو نمونو مقرر ڪرڻ آهي (جيڪڏهن مشين ٺاهيندڙ اڳ ۾ ئي انهن کي ڇڏي ڏيو);
2. فريڪوئنسي ڪنورٽر جي پيراگراف کي سيٽ ڪريو (هن قدم کي ڇڏي ڏيو جيڪڏهن مشين ٺاهيندڙ اڳ ۾ ئي اهو طئي ڪري چڪو آهي);
3. دستي موڊ ۾ ريموٽ ڪنٽرول مقرر ڪريو, ۽ پوء مشين کي ڪم ڪرڻ واري پوزيشن کي منتقل ڪرڻ لاء ريموٽ ڪنٽرول استعمال ڪريو;
4. دستي موڊ ۾, وڏي موٽر ۽ وڏي موٽر جي رفتار جي رفتار لاء IC قيمت مقرر ڪريو;
5. خودڪار موڊ ڏانهن مٽايو ۽ نن moto ي موٽر لاء ڪٽڻ واري رفتار جي حد مقرر ڪريو;
6. خودڪار موڊ ۾, وڏي موٽر شروع ڪرڻ لاء وڏي موٽر سوئچ کي اڳتي وڌايو, ۽ پوء نن moto ي موٽر سوئچ کي اڳتي يا اڳتي وڌڻ لاء رخ ڪيو. ريموٽ ڪنٽرول پاڻمرادو ڪٽڻ واري موڊ ۾ داخل ٿئي ٿو ۽ ڪٽڻ شروع ڪري ٿو.
9.علاج
1. مهرباني ڪري ڪمري جي حرارت تي ان کي ڪمري جي حرارت تي ۽ دٻاء جي زندگي کي وڌائڻ لاء خشڪ ماحول ۾ استعمال ڪريو.
2. مهرباني ڪري غير معمولي ماحول ۾ استعمال ڪرڻ کان پاسو ڪريو جيئن مينهن ۽ پاڻي جي بلبل کي فراهم ڪرڻ جي زندگي جي زندگي کي وڌائڻ لاء.
3. مهرباني ڪري بيٽري جي بيٽري ۽ ڌاتوء جو شمار علائقو صاف رکو.
4. مهرباني ڪري نچڻ ۽ گرڻ جي ڪري ريموٽ ڪنٽرول کي نقصان پهچائڻ کان پاسو ڪريو.
5. جيڪڏهن گهڻو وقت لاء استعمال نه ڪيو ويو آهي, مهرباني ڪري بيٽري کي هٽايو ۽ صاف ۽ محفوظ جڳهه تي ريموٽ ڪنٽرول ۽ بيٽري کي اسٽور ڪريو.
6.اسٽوريج ۽ ٽرانسپورٽ دوران, ڌيان کي نمي ۽ صدمو جي مزاحمت تي ادا ڪيو وڃي.
10. حفاظت جي موڪليل جي معلومات
1. مهرباني ڪري هدايتن کي استعمال ڪرڻ کان پهريان هدايتن کي استعمال ڪرڻ کان پهريان استعمال ڪيو ۽ منع ڪرڻ کان اڳ.
2. مهرباني ڪري بيٽري کي بروقت طريقي سان تبديل ڪريو جڏهن بيٽري ڪافي طاقت جي ڪري غلطين کان بچڻ لاء تمام گهٽ آهي, جيڪو نتيجو ٿي سگهي ٿو ريموٽ ڪنٽرول کي هلائڻ جي قابل ناهي.
3. جيڪڏهن مرمت جي ضرورت آهي, مهرباني ڪري ڪارخاني سان رابطو ڪريو. جيڪڏهن نقصان پنهنجي مرمت جي ڪري آهي, ڪاريگر وارنٽي فراهم نه ڪندو





