Descrición
1.Modelo de produto

Modelo: DH12S-P6S
Equipos aplicables:wire saw/blade saw machine
2.Diagrama de accesorios de produtos

Nota: Podes escoller unha das tres antenas. A antena de ventosa é estándar por defecto.
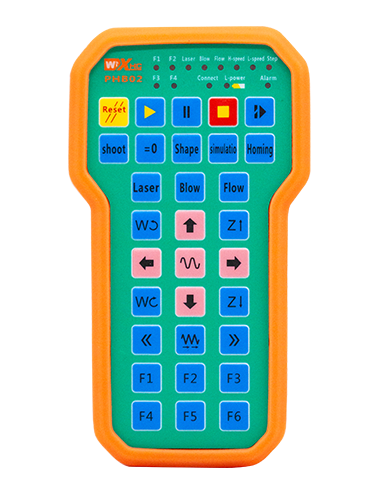
3.Descrición do interruptor de control remoto

4.Presentación do contido

Main motor speed: Main: 0-50
Traveling motor speed: Line: 0-50
Maximum speed limit of automatic cutting traveling motor: Speed: 0-30
(parámetros axustables)
Automatic cutting main motor setting current: Setting: 28 (parámetros axustables)
Swing arm motor speed: Swing: 0-50

Baixa tensión: A batería do control remoto está demasiado baixa, substituír a batería.

Rede caeu: O sinal sen fíos está interrompido. Comprobe a potencia do receptor, encendelo de novo, e reinicie o control remoto.
5.Instrucións de funcionamento da función de control remoto
1)Turn on the remote control
Cando o receptor está acendido, the D2 power light on the receiver is always on, andthe D1 signal light starts to flash; instale dúas pilas AA no control remoto, Activa o interruptor de alimentación, and the display will show the motor speed, indicando un inicio exitoso.
2)Large motor and speed regulation/Main motor and speed regulation
Press and hold “Speed Regulation Enable”, xira o “Adiante/Retroceso” cambiar para avanzar, and the receiver’s main motor will turn on;
Press and hold “Speed Regulation Enable”, xira o “Adiante/Retroceso” cambiar a marcha atrás, and the receiver’s main motor will reverse and turn on;Simply move the switch to the middle or reverse direction, and the main motor will stop immediately without pressing the speed control enable button;Xire o “big motor” knob to adjust the speed regulation voltage of the receiver’s main motor inverter to 0-10V;
3)Traveling motor
Press and hold “Speed Adjustment Enable”, xira o “Adiante/Retroceso” switch to forward or backward, and the walking motor will move at a high speed of 50;
4)Swing arm motor and speed regulation
Xire o “Swing Arm/Reverse” switch to swing arm or retreat, and the receiver’s swing arm motor starts; then rotate the “Speed Adjustment” knob to adjust the swing arm motor speed;
Press and hold “Speed Adjustment Enable”, and then pull the “Swing Arm/Reverse” cambiar, the swing arm motor will move at a high speed of 50;
5)Travel motor speed limit adjustment
Manteña premido o “speed adjustment enable” botón e xira “speed adjustment” to adjust the maximum speed limit of the traveling motor during automatic cutting;
6) Automatic cutting
The first step is to start the main motor; the second step is to adjust the maximum speed limit of the walking motor; the third step is to move the “adiante/atrás” switch forward or backward to enter the automatic cutting mode;
7) Parameter menu (prohíbese aos usuarios modificalo sen permiso)
Enter the parameter menu:En modo manual, when the main motor speed is 0, preme o interruptor cara a adiante/atrás cara arriba tres veces seguidas, and then push it down three times in a row to enterthe parameter menu;
Saia do menú de parámetros: Turn the speed adjustment knob, select save or not save, and press the enable button to confirm;
Rated current: The maximum value of the main motor current, unit Ampere;
Speed adjustment parameters: Automatic cutting control parameters, por defecto 800, unit milli second,está prohibida a modificación;
Parámetro de desaceleración: Cando o valor de cambio da corrente de corte supere este valor, rapid deceleration begins, unit Ampere;
Aceleración a1: When the cutting current is lower than the set cutting current, the speed value increased by each acceleration of the walking motor;
Desaceleración a2: When the cutting current is higher than the set cutting current, the speed value reduced by each deceleration of the walking motor;
Swing arm current: Default value, está prohibida a modificación;
Stop time: After the automatic mode current overload shutdown, the current will be detected again after a period of time. If it is less than the set current, the walking motor will automatically start; unit second, default value, está prohibida a modificación;
Corriente máxima: The range of main motor feedback current, unit Ampere;
Anfitrión máximo: Remote control main motor speed adjustment display range;
Máxima marcha: Invalid parameter;
Compensación do límite de velocidade: During automatic cutting, the remote control display walking motor speed limit = 50% of this parameter;
Increase sensitivity: When the main motor feedback current increases, each time the increase exceeds this value, the walking motor accelerates;
Decrease sensitivity: When the feedback current of the main motor decreases, and each time the decreasing value exceeds this value, the walking motor decelerates;
Sensitivity offset: Add and subtract the offset increment of the sensitivity parameter;
Set current: Corte automático, the threshold of main motor feedback current. If this value is exceeded,the walking motor starts to decelerate;Below this value, the walking motor starts to accelerate;unidade: Ampere;
Idling exit: When the automatic mode starts, if the main motor feedback current is less than this value,it will be in the idling mode.If it is greaterthan this value, it will exit the idling mode and enter the cutting mode.Unit is ampere;
No-load current:When automatic mode starts, if the main motor feedback current is less than this value,it is in no-load mode.If it is greaterthan this value, it will exit the no-load mode and enter the cutting mode.Unit is Ampere;
Swing arm speed: Initial speed of swing arm motor when starting up;
Cutting mode: Switch between blade saw and wire saw modes, and the parameters will switch accordingly after the switch; in blade saw mode, the remote control display adds a swing arm motor, while in wire saw mode, there is no swing arm motor;
Debounce time: When the main motor feedback current exceeds the stop current, the feedback current will be continuously detected. The debounce time is the duration of this continuous detection.After this time, if the main motor current still exceeds the stop current, the walking motor will stop;otherwise, the walking motor will stop. The motor will keep going;
Stop current: The main motor feedback current exceeds this value, and the walking motor will stop;Unit is Ampere;
Offset default: The initial value of the walking motor speed limit when the remote control is turned on = 50% of this value;
6.Características eléctricas do control remoto

7.Tamaño do control remoto

O dereito de interpretación final deste produto só pertence á nosa empresa.