Descriptio
1.Product Model

Exemplar: DH12s-P6s
Lorem apparatu:Wire vidit / Mundi vidit apparatus
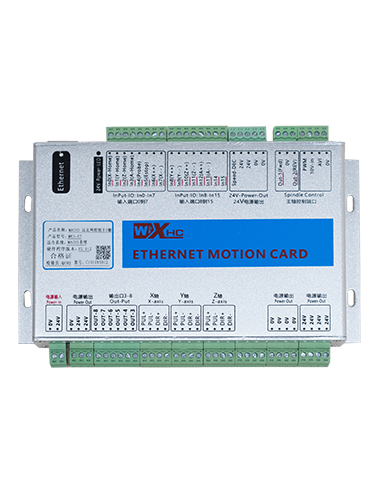
2.Product Books Diagram

Nota: Vos can eligere unum ex tribus antennas. Et Suction Cup Antenna est vexillum per default.
3.Longinquus imperium switch descriptio

4.DisplayContent Introductio

Main motor celeritate: Pelagus: 0-50
Iter motor celeritate: Linea: 0-50
Maxime celeritate terminum latitudinem automatic secans iter motricium: Celeritate: 0-30
(parametri adjustable)
Automatic secans Main motor occasum current: Occasus: 28 (parametri adjustable)
OSCILLATIO Arm Motor celeritate: Praeceps: 0-50

Humilis voltage: Remote control altilium nimis, Placere reponere in altilium.

Network cecidit: Et wireless signum est intermittitur. Placere reprehendo potentia recipiens, Potestatem illud iterum, et sileo in remotis imperium.
5.Remote control munus operandi instructiones
1) Turn in remotis imperium
Cum receptorem nectunt, Et D2 potentia lux in recipiente semper est, Andhe D1 Signum lux incipit ad Flash; Install duo aa gravida in remotis imperium, Turn in virtute switch, Et ostentationem ostendam motricium celeritate, significat prospere startup.
2) Magna motor et celeritate ordinandus / principalis motricium et celeritate ordinacione
Torcular et tenere “Celeritate ordinacione enable”, conversus “Porro / Reverse” SWITCH PRIMO, Et Receptor est scriptor principalis motricium et conversus est;
Torcular et tenere “Celeritate ordinacione enable”, conversus “Porro / Reverse” MANCEPS, et accipientis scriptor principalis motricium mos e converso et conversus in;Tantum moveri switch ad medium vel vicissim partem, Et principalis motor non prohibere statim sine urgeat celeritas imperium activare button;Rotate “magnus motricium” Knob ad adjust celeritate ordinacione voltage de recipientis scriptor principalis motor inverter ad 0-10v;
3) Iter motricium
Torcular et tenere “Celeriter Admitte TEMPERATIO”, conversus “Porro / Reverse” Switch ad tergum vel retrorsum, Et ambulans motricium movebo a summo 50;
4) Auctura Armate motricium et celeritate ordinacione
Conversus “Adductius Armate / Reverse” Switch ad adductius brachium aut receptum, et recipientis scriptor adductius brachium motor animi; Tunc gyrari “Volo temperatio” Knob ad adjust ad adductius brachium motricium celeritate;
Torcular et tenere “Celeriter Admitte TEMPERATIO”, et trahere in “Adductius Armate / Reverse” switch, Et adductius brachium motor movebo ad altum celeritatem 50;
5) Travel motor celeritate terminum temperatio
Torcular et tenere “Celeriter Admitte TEMPERATIO” button et gyrari “Volo temperatio” Ad adjust maximam celeritate terminus iter motricium per automatic secans;
6) Automatic secans
Primum gradum est ut satus principalis motricium; Secundum gradus est ad adjust maximam celeritate terminum de ambulando motricium; Tertium gradus est movere “Porro / Reverse” Switch aut retro adire automatic secans modus;
7) Parameter menu (users prohibentur ab modifinging eam sine permission)
Intra parametri menu:In manual modus, Cum principalis motor celeritate est 0, ventilabis deinceps / vicissim switch ter in ordine, tum ventilabis ter in ordine ad Enterthe parametri menu;
Exit parametri menu: Turn celeritas temperatio knob, Select salvum nec salvare, Et premere ad activare puga Confirmare;
Current Rated: Maximum valorem de principalis motricium current, unitas ampere;
Celeritas temperatio parametri: Automatic secans imperium parametri, default 800, unitas Milli secundo,mutatio est prohibitus;
Torus parameter: Cum cutting current mutatio valorem excedit hoc valore, celeri retardatio incipit, unitas ampere;
Acceleratio A1: Cum autem cutting current est inferior quam set secans current, celeritas valorem auctus per se acceleratio de ambulando motricium;
A2 torpet: Cum cutting current est altior quam set secare current, Celeritas valorem reducitur per se retardationem ambulat motricium;
Current Current adductius: Default valorem, mutatio est prohibitus;
Subsisto tempore: Post Lorem Modus Current ONERO Shutdown, In current et deprehendi iterum post tempus. Si minus quam positus current, Et ambulans motricium mos statim satus; unitas secundo, default valorem, mutatio est prohibitus;
Maximus current: In range of Main motricium videre current, unitas ampere;
Maximum exercitum: Motor Motor Display Display Disputatio Motor Remige;
Maximum ambulans: Aliquam parameter;
Celeritate terminum offset: Per automatic secans, Remota imperium propono ambulans motricium celeritate terminum = 50% huiusmodi parameter;
PROFECTIO: Cum pelagus motricium videre current crescit, Quisque tempus crescat excedit hoc valore, Et ambulans motricium accelerat;
PRAETENDO: Cum feedback current de principalis motor decrescit, Et quisque tempus decrescentes pretii excedit hoc valore, Et ambulans motricium decelerates;
Sensus Offset: Addere et subtrahere offset incrementum sensitivity modularis;
Set current: CAECORUM, In limine de Main motor videre current. Si valore exceditur,Ambulans motricium incipit ad torpet;Infra hanc valorem, ambulans motricium incipit accelerate;unitas: Ampere;
Idling Exit: Quando autem automatic modus incipit, Si pelagus motricium feedback current est minus, quam hoc valore,Erit in Offline Mode.If est Greaterhan hoc valore, Erit exire ad idling modus et intrare secans mode.Unit est ampere;
Non-onus current:Quando automatic modus incipit, Si pelagus motricium feedback current est minus, quam hoc valore,Non est in non-onus mode.If est Greaterhan hoc valore, Is mos exire non-onus modus et intrabit in secans mode.unit est ampere;
Swing brachium celeritate: Initial celeritate adductius brachium motricium cum incipiens est;
Secans modus: Switch inter ferrum vidit et filum vidit modos, et parametri et switch ita post switch; In ferrum vidit modus, remote imperium ostentationem addit adductius brachium motor, Dum in filum vidit modus, Non est adductius brachium motricium;
Somno tempore: Cum pelagus motricium videre current excedit in subsisto current, Et feedback current erit continuously deprehendi. Debounce tempus durationem continuam detection.After hoc, Si principalis motor current adhuc excedit ad stop current, Et ambulans motor non prohibere;aliter, Et ambulans motor non prohibere. Et motricium mos servo iens;
Current nolite: Pelagus motricium videre current excedit hanc valorem, Et ambulans motricium et prohibere;Unitas est ampere;
Default offset: Initial valorem de walking motricium celeritate terminum, cum remote control est in = 50% De hoc valore;
6.Remota imperium electrica characteres

7.Remota imperium magnitudine

In ultima interpretatio ius huius productum pertinet solum ad nostram turma.