Descrição
1.Modelo do produto

Modelo: DH12S-P6S
Equipamento aplicável:serra de fio/máquina de serra de lâmina
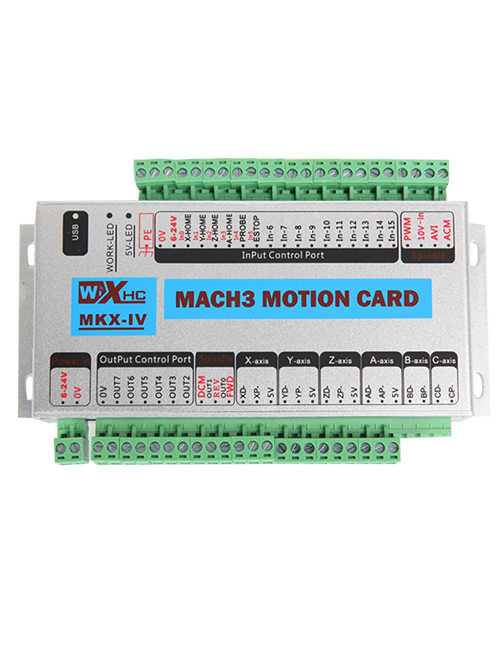
2.Diagrama de acessórios do produto

Observação: Você pode escolher uma das três antenas. A antena da ventosa é padrão por padrão.
3.Descrição do interruptor de controle remoto

4.Introdução ao conteúdo de exibição

Velocidade do motor principal: Principal: 0-50
Velocidade do motor de deslocamento: Linha: 0-50
Limite máximo de velocidade do motor de corte automático: Velocidade: 0-30
(parâmetros ajustáveis)
Corrente de ajuste do motor principal de corte automático: Contexto: 28 (parâmetros ajustáveis)
Velocidade do motor do braço oscilante: Balanço: 0-50

Baixa tensão: A bateria do controle remoto está muito fraca, por favor substitua a bateria.

Rede caiu: O sinal sem fio é interrompido. Por favor, verifique a potência do receptor, ligue-o novamente, e reinicie o controle remoto.
5.Instruções de operação da função de controle remoto
1)Ligue o controle remoto
Quando o receptor está ligado, a luz de energia D2 no receptor está sempre acesa, e a luz de sinalização D1 começa a piscar; instale duas pilhas AA no controle remoto, ligue o interruptor de alimentação, e o display mostrará a velocidade do motor, indicando inicialização bem-sucedida.
2) Motor grande e regulação de velocidade/Motor principal e regulação de velocidade
Pressione e segure “Ativar regulação de velocidade”, vire o “Avançar/Retroceder” mudar para avançar, e o motor principal do receptor ligará;
Pressione e segure “Ativar regulação de velocidade”, vire o “Avançar/Retroceder” mudar para marcha ré, e o motor principal do receptor irá reverter e ligar;Basta mover o interruptor para a direção intermediária ou reversa, e o motor principal irá parar imediatamente sem pressionar o botão de habilitação do controle de velocidade;Gire o “motor grande” botão para ajustar a tensão de regulação de velocidade do inversor do motor principal do receptor para 0-10V;
3)Motor de viagem
Pressione e segure “Ativar ajuste de velocidade”, vire o “Avançar/Retroceder” mudar para frente ou para trás, e o motor de caminhada se moverá a uma alta velocidade de 50;
4) Motor do braço oscilante e regulação de velocidade
Vire o “Braço oscilante/reverso” mudar para braço oscilante ou recuar, e o motor do braço oscilante do receptor começa; depois gire o “Ajuste de velocidade” botão para ajustar a velocidade do motor do braço oscilante;
Pressione e segure “Ativar ajuste de velocidade”, e depois puxe o “Braço oscilante/reverso” trocar, o motor do braço oscilante se moverá a uma alta velocidade de 50;
5)Ajuste do limite de velocidade do motor de deslocamento
Pressione e segure o “habilitação de ajuste de velocidade” botão e gire o “ajuste de velocidade” para ajustar o limite máximo de velocidade do motor de deslocamento durante o corte automático;
6) Corte automático
O primeiro passo é ligar o motor principal; o segundo passo é ajustar o limite máximo de velocidade do motor ambulante; o terceiro passo é mover o “avançar/retroceder” mude para frente ou para trás para entrar no modo de corte automático;
7) Menu de parâmetros (os usuários estão proibidos de modificá-lo sem permissão)
Entre no menu de parâmetros:No modo manual, quando a velocidade do motor principal é 0, empurre o interruptor de avanço/reverso para cima três vezes seguidas, e, em seguida, pressione-o três vezes seguidas para entrar no menu de parâmetros;
Sair do menu de parâmetros: Gire o botão de ajuste de velocidade, selecione salvar ou não salvar, e pressione o botão ativar para confirmar;
Corrente nominal: O valor máximo da corrente do motor principal, unidade Ampére;
Parâmetros de ajuste de velocidade: Parâmetros de controle de corte automático, padrão 800, unidade milissegundo,modificação é proibida;
Parâmetro de desaceleração: Quando o valor de alteração da corrente de corte excede este valor, começa a desaceleração rápida, unidade Ampére;
Aceleração a1: Quando a corrente de corte é inferior à corrente de corte definida, o valor da velocidade aumentado por cada aceleração do motor ambulante;
Desaceleração a2: Quando a corrente de corte é superior à corrente de corte definida, o valor da velocidade reduzido por cada desaceleração do motor ambulante;
Corrente do braço oscilante: Valor padrão, modificação é proibida;
Parar o tempo: Após o desligamento por sobrecarga de corrente no modo automático, a corrente será detectada novamente após um período de tempo. Se for menor que a corrente definida, o motor de caminhada iniciará automaticamente; unidade de segundo, valor padrão, modificação é proibida;
Corrente máxima: A faixa da corrente de feedback do motor principal, unidade Ampére;
Host máximo: Faixa de exibição de ajuste de velocidade do motor principal de controle remoto;
Caminhada máxima: Parâmetro inválido;
Deslocamento do limite de velocidade: Durante o corte automático, o limite de velocidade do motor de caminhada no display do controle remoto = 50% deste parâmetro;
Aumentar a sensibilidade: Quando a corrente de realimentação do motor principal aumenta, cada vez que o aumento excede esse valor, o motor de caminhada acelera;
Diminuir a sensibilidade: Quando a corrente de feedback do motor principal diminui, e cada vez que o valor decrescente excede este valor, o motor de caminhada desacelera;
Compensação de sensibilidade: Adicione e subtraia o incremento de deslocamento do parâmetro de sensibilidade;
Definir atual: Corte automático, o limite da corrente de feedback do motor principal. Se este valor for excedido,o motor de caminhada começa a desacelerar;Abaixo deste valor, o motor de caminhada começa a acelerar;unidade: Ampére;
Saída ociosa: Quando o modo automático é iniciado, se a corrente de feedback do motor principal for menor que este valor,estará no modo inativo. Se for maior que este valor, ele sairá do modo inativo e entrará no modo de corte. A unidade é ampere;
Corrente sem carga:Quando o modo automático é iniciado, se a corrente de feedback do motor principal for menor que este valor,está no modo sem carga. Se for maior que este valor, ele sairá do modo sem carga e entrará no modo de corte. A unidade é Ampere;
Velocidade do braço oscilante: Velocidade inicial do motor do braço oscilante ao iniciar;
Modo de corte: Alternar entre os modos de serra de lâmina e serra de fio, e os parâmetros mudarão de acordo após a mudança; no modo de serra de lâmina, o display do controle remoto adiciona um motor de braço oscilante, enquanto estiver no modo serra de fio, não há motor de braço oscilante;
Hora de rejeição: Quando a corrente de feedback do motor principal excede a corrente de parada, a corrente de feedback será detectada continuamente. O tempo de depuração é a duração desta detecção contínua. Após este tempo, se a corrente do motor principal ainda exceder a corrente de parada, o motor de caminhada irá parar;de outra forma, o motor de caminhada irá parar. O motor continuará funcionando;
Parar atual: A corrente de feedback do motor principal excede este valor, e o motor de caminhada irá parar;Unidade é Ampere;
Padrão de deslocamento: O valor inicial do limite de velocidade do motor de caminhada quando o controle remoto está ligado = 50% deste valor;
6.Características elétricas do controle remoto

7.Tamanho do controle remoto

O direito de interpretação final deste produto pertence apenas à nossa empresa.



-500x650.png)