应用:专门用于轨道锯机器
1.支持自动切割模式, 根据大电机电流自动调整小电动机的步行速度, 并实现自动切割控制.
2.无屏障传输距离为 200 仪表.
3. 支持大型电动机和小型电动机的双速度调节.
4. 支撑小型电动机旋转到位.
5. 支撑左右车轮小电动机线性校正.
应用:专门用于轨道锯机器
1.支持自动切割模式, 根据大电机电流自动调整小电动机的步行速度, 并实现自动切割控制.
2.无屏障传输距离为 200 仪表.
3. 支持大型电动机和小型电动机的双速度调节.
4. 支撑小型电动机旋转到位.
5. 支撑左右车轮小电动机线性校正.

模型: DH12S-LD
适用的设备:爬虫电线机器
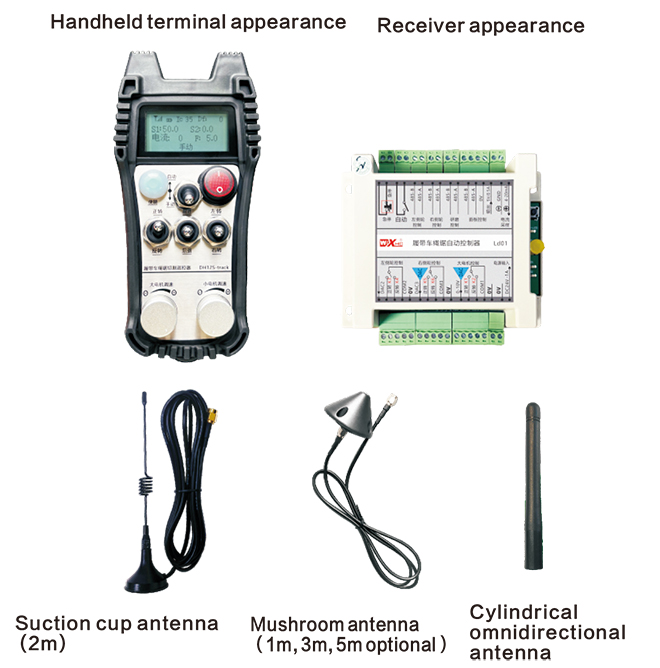
笔记: 您可以选择三个天线之一. 默认情况下,吸入杯天线是标准的.
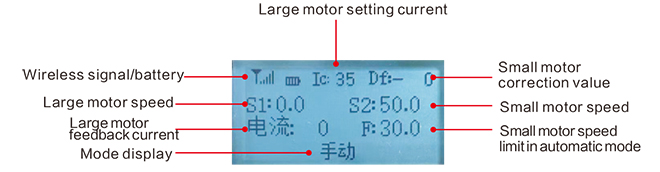
较大的电动机速度:S1:0-50
小型电动机速度: S2: 0-50
最大Speedlimitofainatic cuttingsmallmotor:f:0-30(参数adjustable)
自动切割最大电流: 我知道了: 0-35 (参数可调节)
线性校正值: DF: -99-99 (1 单元约为0.02V)

低压: 遥控电池太低, 请更换电池.

网络下降: 无线信号中断. 请检查接收器的功能, 再次为其供电, 并重新启动遥控器.
1.打开遥控器
当上电, 接收器上的RF领导的灯开始闪烁;在Tryaver E遥控器中安装两个AA电池, 打开电源开关, 显示屏将显示运动速度, 表示成功的启动.
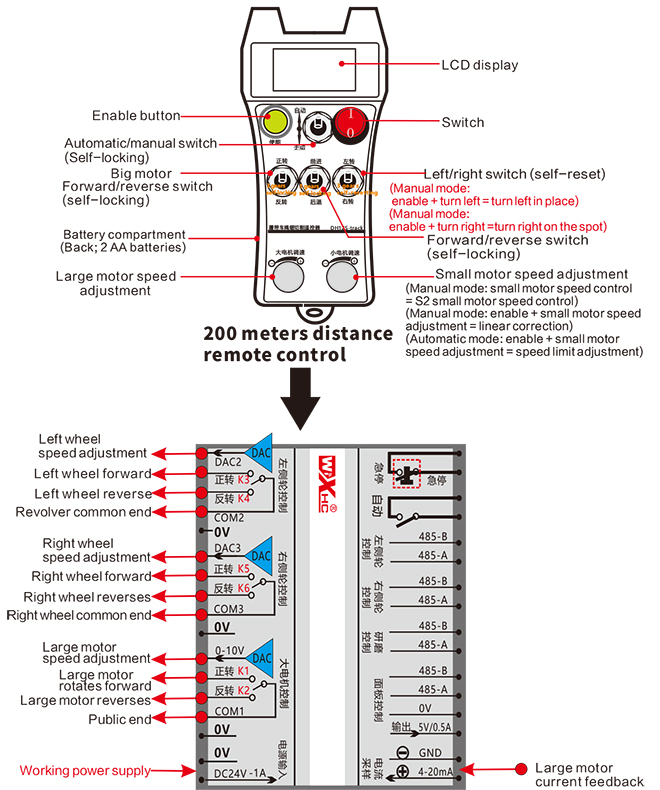
2.大电机和速度法规
转 “向前/反向” 切换到向前, 接收器的大电机将打开, 显示将显示向前![]()
转 “向前/反向” 切换到反向, 接收器的大电动机将反向打开, 显示屏将显示反向![]()
旋转 “大型运动速度调整” 旋钮调整接收器的大电机速度调节输出电压0-10V;
3.小型电机和速度调节
移动 “向前/反向” 切换到向前, 接收器的左轮前轮和右车轮被打开, 并且显示器向前显示 ![]()
转 “向前/反向” 切换到反向, 接收器的左轮反向和右车轮反向打开, 显示显示反向![]()
4.左右转
转 “左/右” 切换到左, 接收器的右车轮将向前并打开,显示显示将显示为左![]()
转 “向左/右转” 切换到右转, 接收器的左轮将向前并打开, 显示屏将显示右转![]()
5.转到到位
在手动模式下:
左转到位: 按住 “使能够” 按钮, 转 “左/右转” 切换到左, 接收器的向后和右车轮向后打开,并开始向左旋转到位;
右转到位: 按住 “使能够” 按钮, 转 “左/右转” 切换到右, 接收器的左车轮向前和右车轮反向打开, 而且接收器开始向右右转;
6.小型运动速度限制调整
在自动模式下: 按住 “使能够” 按钮并旋转 “小型运动速度调节” 在自动切割过程中调整小电动机的最大速度;
7.自动切割
第一步是启动大电机; 第二步是将模式开关切换到 “汽车”; 第三步是启动小电动机,屏幕将显示 “切割自动”,表明它已经进入自动切割模式;
8. 直线校正
当左右步行电动机向前和向后移动时, 左右速度不一致, 和直线行走的偏差. 您可以使用遥控器的线性校正功能来微调左右车轮的速度;
更正原则: 通过校正功能, 左轮的速度微调以达到与右轮的速度相同的速度, 为了同步左右车轮的速度并消除偏差;
偏差操作方法: 在手动模式下, 按住 “使能够” 按钮并旋转 “小运动速度法规”;
顺时针旋转以增加左轮速度电压和显示屏上的校正值;
逆时针旋转以降低左轮速度电压和显示校正值以降低;
更正范围: 更正值 -90 到 90; 一个校正单元的校正电压约为0.02V;
9. 参数菜单 (禁止未经许可将用户修改)
可以通过参数调整遥控器的某些功能. 在手动模式下, 当小运动速度S2为 10, 连续将前进/反向开关向上推动, 然后连续将其推下3次进入参数菜单;
退出参数菜单: 选择保存或不保存, 然后按启用按钮确认出口;
最大电流: 切割电机的操作额定电流为 80% 这个电流;
速度控制参数: 自动切割控制参数, 默认 800, 禁止修改;
减速参数: 自动切割控制参数. 当切割电流变化值超过此值时,减速开始.
加速A1: 自动切割控制参数, 当切割电流低于设定切割电流, 加速速度;
减速A2: 自动切割控制参数, 当切割电流高于集合
切割电流, 减速速度;
自动刀撤回: 无效的;
开始自锁: 0, 没有自锁; 1, 自锁. 按启用键 + 向前和逆转以生效和自我锁.
最大步行: 小电动机的最大速度.
切割电流: 将主电机的最大电流设置为自动切割. 如果反馈电流超过此值, 它将开始减速.
默认速度限制: 打开机器时自动切割速度的默认最大速度.
自动模式: 0, 自动开关自动控制; 1, 自动开关控制自动IO输出点.
速度限制偏移: 自动切割期间小电动机的最大速度.
最大主机: 大电动机的最大速度.

该产品的最终解释权仅属于我们公司.