応用:トラックカーロープソーの自動切断用のリモコンは、トラックタイプのロープソーカッティングマシンに適しています
1. 速度規制をサポートします, 起動, そして、大規模なモーター周波数コンバーターの現在の読み取り.
2. 左右のトラック周波数コンバーター速度レギュレーションをサポートします, 起動, フロント, 戻る, 左右のコントロール.
3. 左および右のトラック周波数コンバーターの線形補正をサポートして、マシンを
直線.
応用:トラックカーロープソーの自動切断用のリモコンは、トラックタイプのロープソーカッティングマシンに適しています
1. 速度規制をサポートします, 起動, そして、大規模なモーター周波数コンバーターの現在の読み取り.
2. 左右のトラック周波数コンバーター速度レギュレーションをサポートします, 起動, フロント, 戻る, 左右のコントロール.
3. 左および右のトラック周波数コンバーターの線形補正をサポートして、マシンを
直線.
トラックカーロープソーの自動切断用リモコンはトラックタイプのロープソーに適しています
切断機. それは、 485 左右のトラック周波数を制御する Modbus RTU プロトコル
コンバーター, 大型モーターの周波数変換速度制御スタートとフロントも同様に, 後方,
左右の方向コントローラー. そして、それは大きなモーター周波数の動作電流を読み取ることができます
コンバーターを介して 485 Modbus RTU プロトコル. 電流を分析して比較することで、
大型モーター, 左右のトラックの速度はリアルタイムで自動的に調整できます。
自動カット機能を実現.
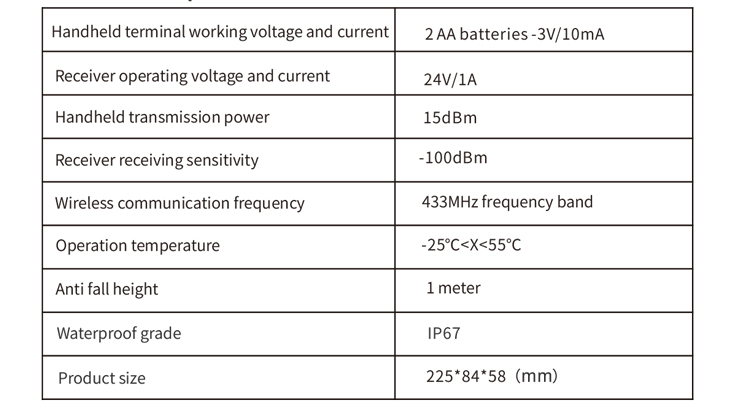
1. 433MHz無線通信技術を採用, ワイヤレス動作距離 100 メーター.
2. 自動周波数ホッピング機能を採用し、使用します 32 ワイヤレスリモコンのセット
同時に, お互いに影響を与えることなく.
3. すべての周波数コンバータをサポート 485 Modbus RTU プロトコル, 現在対応している周波数
コンバータのブランドには次のものがあります:上海Xielin, 富士, 恵川, Zhongchen, invt, そして . ブランド向け
互換性がないもの, カスタマイズについてはお問い合わせください.
4. 速度規制をサポートします, 起動, そして、大規模なモーター周波数コンバーターの現在の読み取り.
5. 左右のトラック周波数コンバーター速度レギュレーションをサポートします, 起動, フロント, 戻る, 左右のコントロール.
6. 左および右のトラック周波数コンバーターの線形補正をサポートして、マシンを
直線.
7. ロープソーの自動切断機能をサポート, 左右のトラックの速度を自動的に調整します
大型モーターの電流情報に応じたリアルタイム.
8. モーターの起動・停止などのダイレクトIO出力制御にも対応, およびアナログ電圧出力
モーター速度の制御.
3. 製品仕様
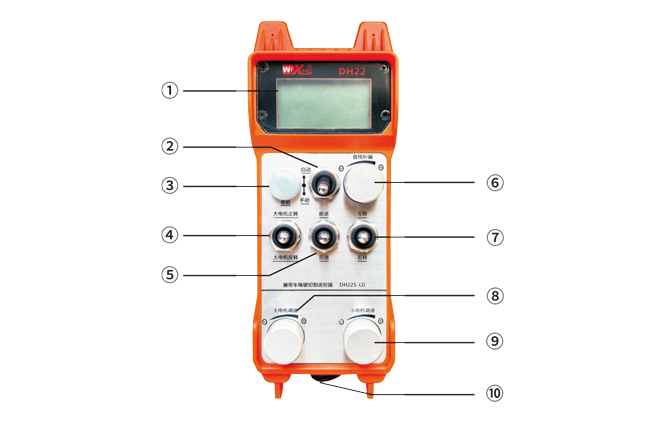
4. 製品機能紹介
メモ:
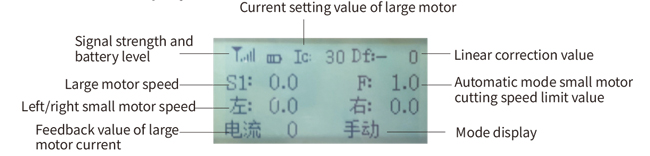
screanディスプレイ:
modeモードスイッチ:
③有効にする:
コンビネーションボタン, 一部の操作では、操作のためにイネーブルボタンを押す必要があります,詳細については、各スイッチの説明を参照してください.
④大型モータースイッチ:
3速リセットスイッチを使用します, このスイッチを引くと、大型モーターの前方回転と逆回転を制御できます. リリースした後, 状態は残ります, また、画面に対応するディスプレイがあります. S1↑の矢印は正転を示します, S1 ↓の矢印は逆回転を示します.
smallモーターフォワード/リバーススイッチ:
小型モーターの前面に 3 速セルフロックスイッチが装備されています。. イネーブルボタンを押してこのスイッチを引くと、小型モーターが前後に動くように制御できます。, 対応する表示が画面に表示されます。 ↑↑ 矢印は前方を表します。, ↓↓ 矢印は後方を表します.
⑥直線補正:
マルチターンエンコーダーノブを使用します, 有効化ボタンを押してください, ノブを右に回します, 直線補正を表示します: DF: 左回転ノブは ずつ増加します 1 1回転あたりの単位, そして左
モーターの速度は次のように増加します 0.1 ユニット; 左ノブを回します, 直線補正ディスプレイ: DF: 右側に, ノブを回すたびに増加します 1 ユニット, そして右側のモーターの速度が上がります
による 0.1 ユニット.
⑦小型モーター回転スイッチ:
3速リセットスイッチを使用します, 手動で操作したとき, 小さなモーターを制御して左または右に曲がることができます. 一度リリースされます, リモコンはこの動作を自動的に停止します. 前進状態では, このスイッチを回すと, 対応する表示が画面に表示されます. ←↑矢印は左折を示します, ↑→矢印は右折を示します。リバースモード時, このスイッチを回すと、対応する表示が画面に表示されます. ←↓矢印は左折を示します, ↓→矢印は右折を示します.
olid大きなモーター速度調節:
マルチターンエンコーダーノブを使用します, 回転する 1 毎回グリッド, 大規模なモーターの速度値はおよそ変化します 0.2 ユニット. 高速回転により、大型モーターの速度値を素早く変更できます。.
⑨ 小型モーターの速度調整:
マルチターンエンコーダーノブを使用します, 手動モードで, 有効化ボタンを押して、一度に 1 つのグリッドを回転します,左右の小型モーターの速度値が約変化します 0.1 ユニット, 高速回転により、小型モーターの速度値を素早く変更できます。自動モードでは, 有効化ボタンを押して、一度に 1 つのグリッドを回転させます,小型モータの速度制限値 F は約 1 変化します。 0.1 ユニット. 高速回転により、小型モーターの速度制限値を素早く変更できます。.
⑩ リモコン電源スイッチ
リモートコントロールディスプレイ画面がオンになっています.
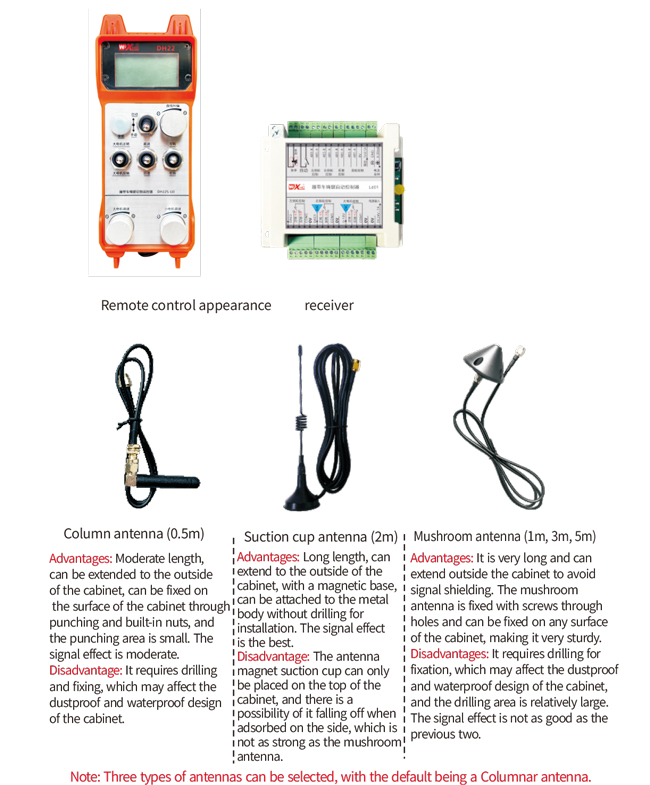
5. 製品アクセサリー図
6. 製品インストールガイド
6.1 製品のインストール手順
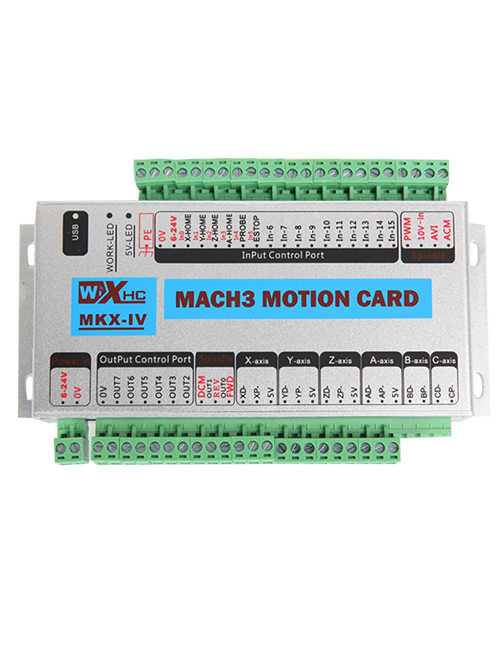
1. 背面のバックルを通して受信機を電気キャビネットに取り付けます, または受信機の四隅のネジ穴からキャビネットに取り付けます。.
2. 当社の受信機配線図を参照して、現場の機器と比較してください。. 機器を有線で受信機に接続します.
3. 受信機を固定したら, 受信機に装備されたアンテナを接続し、アンテナの外側端を電気キャビネットの外に設置または配置する必要があります. 最良の信号効果を得るために、電気キャビネットの上部に配置することをお勧めします. アンテナを未接続のままにしたり、電気キャビネット内に置いたりすることは禁止されています。, 信号が使用できなくなる可能性があるため、.
4. ついに, リモコンに電池を取り付けます, バッテリーカバーを締めます, そしてリモコンの電源スイッチを入れます. リモコンの表示画面が正常に表示された後、
作業インターフェイス, リモコン操作が可能.
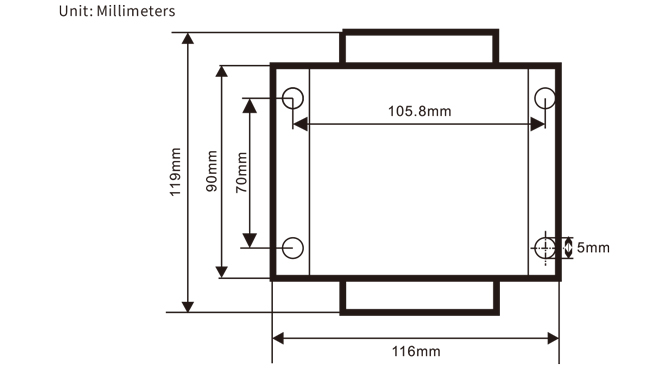
6.2 受信機のインストール寸法
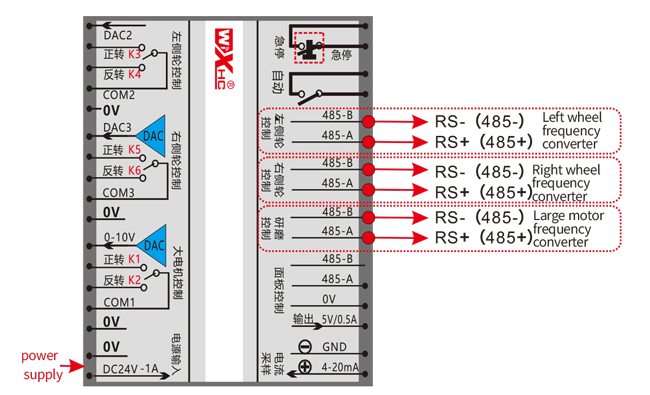
6.3 レシーバー配線参照図
7. 製品操作の指示
7.1 リモートコントロールパラメーター設定
リモコンのバックエンドパラメータを入力する方法:
モードスイッチをマニュアルモードに切り替えます, 小さなモーターの速度を調整します 25 両側に, または 0, 10, 20, 40, 50 あらゆる面で, 大型モーターの前進スイッチを上げ続けます 3 回とダウン 3 時代;
を使用します “小さなモーター速度制御” ページをめくるノブ, 有効化ボタンを押してください, 次に、小さなモーター速度制御ノブを回してパラメータを変更します。. 修正後, ページを最後まで回します,選択する “保存” 出る, 有効化ボタンを押してメニューを終了します;
パラメーターは次のとおりです:
最大電流: 大電流のフィードバック範囲, 設定範囲15~200A, デフォルト 100;
速度制御パラメーター: 自動モード, 小型モーターが自動的に速くまたは遅く加速します,小さいほど速くなります, 設定範囲 200-1500, デフォルト 800;
減速パラメーター: モーターの回転速度を変更できる上限を設定します. 現在がこの値を超えて変化したとき, 減速が発生します. 小さいほど, 左右のモーターの減速が速くなります, の範囲で 05-12 そしてデフォルトの 06;
加速A1: モーター速度が大きいほど, 増えるのが早いほど, の範囲で 00-06 そしてデフォルトの 01;
減速A2: モーター速度が大きいほど, 減少が早くなるほど, の範囲で 00-06 そしてデフォルトの 02;
速度規制を有効にします: 小型モーター速度調整を有効にする必要がありますか?? 00 有効になりません, 01 可能にする, デフォルトは 01;
セルフロックを開始する: 大型モーターは正逆スイッチを放した後も自動的にセルフロックを維持しますか?? 00 保持しない, 01 保持します, デフォルト 01
最大のウォーキング: 左右のモーターの最高速度, 範囲 10-100, デフォルト 50;
カット電流: 最大切断電流, IC値として画面に表示, 範囲 15-160, デフォルト 30,
ICに対応: 30 画面に表示される. このパラメータの上限は 80% 最大電流の;
デフォルトの速度制限: 小型モーターの自動切断速度をオンにしたときのデフォルトの速度は、 0-100, デフォルトでは 10. 画面にはF1.0が表示されます, このパラメータは、最大歩行量が に設定されている場合にのみ正確です。 50.
自動モード: に設定します 00, 自動/手動切り替えはモード切り替えです. に設定します 01, 自動/手動スイッチが自動位置に設定されている, ディスプレイ画面に照明が表示される, 受信機の自動端子出力が閉じられます. マニュアルに設定した場合, 自動出力端子が外れている;
制限速度逸脱: 小型モーターの自動切断速度の上限は、 00 に 200, デフォルトでは 60 および対応する表示 6.0 画面上で; 表示値の上限値=速度制限オフセット× 0.1;
最大ホスト: 大型モーターの最高速度, 範囲 10-100, デフォルト 50;
Mbus機器 (必須): 大型モータ周波数変換器モデルの選定, 範囲 00-03, デフォルト 03;
00- 上海謝林01-Fuji
02-INVT 03-イノヴァンス(中成), ロビコン)
SBUS機器 (必須): 小さなモーター周波数コンバーターモデルの選択, 範囲 00-05, デフォルト 03;
00- 上海謝林01-Fuji
02-INVT 03-イノヴァンス(中成), ロビコン)
04-Anchuanda 05-None
7.2 周波数コンバーターのパラメーター設定
1. コマンドソースの選択: 通信コマンドチャネル
2. 主な周波数ソースの選択: 与えられたコミュニケーション
3. ボーレート: 19200
4. データ形式: 検証なし, データ形式<8-n-1>
5. ローカルアドレス: 左の周波数コンバーターをに設定します 1, 適切な周波数コンバーター 2, そして
大型モーター周波数コンバーター 3
7.3 リモートコントロール操作の手順
1. マシンの電源, リモートコントロールをオンにします, リモコンのバックエンドに入る, を設定します
リモートコントロールバックエンドパラメータ, 主に小型モーターと大型モーターの周波数を設定します
コンバータモデル: (機械メーカーがすでに設定している場合は、この手順をスキップします);
2. 周波数コンバーターのパラメーターを設定します (機械メーカーの場合は、このステップを飛ばしてください。
すでに設定しています);
3. リモートコントロールをマニュアルモードに設定します, 次に、リモコンを使用してマシンを次の場所に移動します。
作業位置;
4. 手動モードで, 大型モータの切断電流をICと大型モータの回転数に設定
5. 自動モードに切り替えて、小さなモーターの切削速度制限f値を設定します;
6. 自動モードで, 大きなモータースイッチを転換して前方に回して、大きなモーターを開始します, それから向きを変える
小型モータースイッチで前進または後進, リモコンは自動カットに入ります
カットを開始するモード.
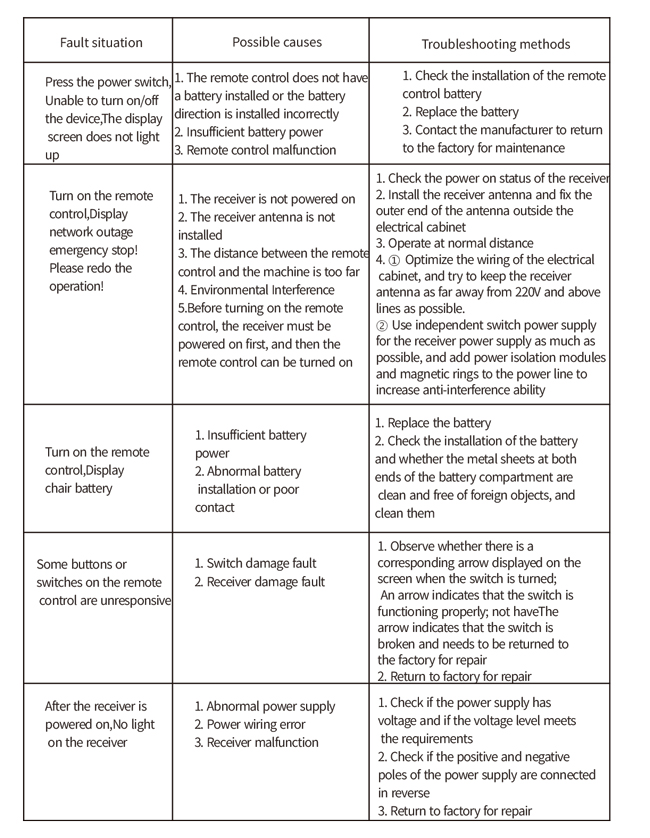
8.製品のトラブルシューティング
9.メンテナンス
1. 室温と圧力の乾燥環境でそれを使用して、そのサービス寿命を延ばしてください.
2. 雨や水の泡などの異常な環境で使用して、サービスの寿命を延ばしないでください.
3. バッテリーコンパートメントと金属製のsh散弾領域をきれいに保ちます.
4. 絞りや転倒のためにリモートコントロールを損傷することは避けてください.
5. 長い間使用されていない場合, 電池を取り外し、リモコンと電池を清潔な場所に保管してください。
そして安全な場所.
6.貯蔵および輸送中, 水分と衝撃耐性に注意を払う必要があります.
10. 安全情報
1. 使用する前に指示を注意深く読んで、非専門家が運営を禁止してください.
2. 電池残量が少なくなった場合は、原因によるエラーを避けるために、適時に電池を交換してください。
電力不足, リモートコントロールが操作できないようになる可能性があります.
3. 修理が必要な場合, メーカーに連絡してください. 損傷が自己修復によって引き起こされる場合, メーカー
保証は提供されません.