応用:クローラーワイヤーソーマシンに特別に使用されます
1.自動切断機能をサポートします, モーター電流フィードバックに応じて、切削速度を自動的に調整します
2.バリアフリー送信距離はです 200 メーター.
3. DCドライバーをサポートします.
4. 複数の切断パラメーター設定をサポートします, カット電流など, 速度制限を切る, 等.
5. ワイヤーソーとブレードソーモード間の切り替えをサポートします. さまざまなモードで異なる切断パラメーターを設定できます.
応用:クローラーワイヤーソーマシンに特別に使用されます
1.自動切断機能をサポートします, モーター電流フィードバックに応じて、切削速度を自動的に調整します
2.バリアフリー送信距離はです 200 メーター.
3. DCドライバーをサポートします.
4. 複数の切断パラメーター設定をサポートします, カット電流など, 速度制限を切る, 等.
5. ワイヤーソーとブレードソーモード間の切り替えをサポートします. さまざまなモードで異なる切断パラメーターを設定できます.

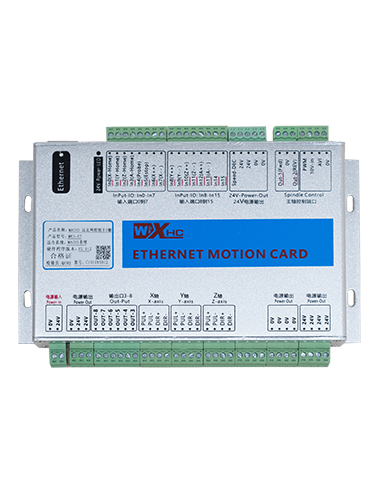
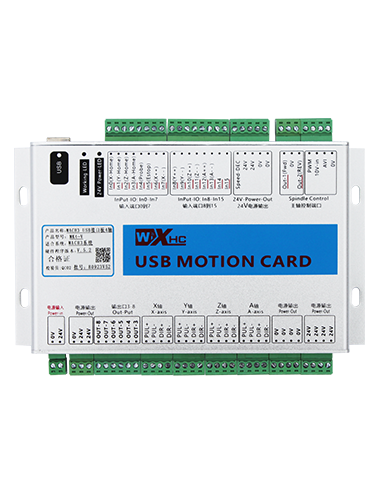
モデル: DH12S-P6S
適用される機器:ワイヤーソー/ブレードソーマシン

注記: 3つのアンテナのいずれかを選択できます. 吸引カップアンテナはデフォルトで標準です.


主なモーター速度: 主要: 0-50
移動モーター速度: ライン: 0-50
自動切断移動モーターの最大速度制限: スピード: 0-30
(パラメーターは調整可能です)
自動切断メインモーター設定電流: 設定: 28 (パラメーターは調整可能です)
スイングアームモータースピード: スイング: 0-50

低電圧: リモートコントロールバッテリーが低すぎます, バッテリーを交換してください.

ネットワークがドロップされました: ワイヤレス信号が中断されます. 受信機の電源を確認してください, もう一度電源を入れてください, リモートコントロールを再起動します.
1remoteリモートコントロールをオンにします
受信機の電源を入れたとき, 受信機のD2パワーライトは常にオンになっています, また、D1信号光が点滅し始めます; リモコンに2つのAAバッテリーを取り付けます, 電源スイッチをオンにします, ディスプレイにはモーター速度が表示されます, スタートアップが成功したことを示します.
2)大型モーターおよび速度調整/主なモーターおよび速度調節
押し続けます “速度規制を有効にします”, 回転します “フォワード/リバース” フォワードに切り替えます, 受信機のメインモーターがオンになります;
押し続けます “速度規制を有効にします”, 回転します “フォワード/リバース” 逆に切り替えます, そして、レシーバーのメインモーターが逆転してオンになります;スイッチを中央または逆方向に移動するだけです, メインモーターは、速度制御の有効ボタンを押すことなくすぐに停止します;回転します “大きなモーター” ノブレシーバーのメインモーターインバーターの速度調整電圧を0-10Vに調整する;
3)走行モーター
押し続けます “速度調整を有効にします”, 回転します “フォワード/リバース” 前方または後方に切り替えます, そして、ウォーキングモーターはの高速で移動します 50;
4swingスイングアームモーターと速度調整
回転します “スイングアーム/リバース” スイングアームまたはリトリートに切り替えます, レシーバーのスイングアームモーターが始まります; 次に、回転します “速度調整” スイングアームモーターの速度を調整するためのノブ;
押し続けます “速度調整を有効にします”, そして、それを引っ張ります “スイングアーム/リバース” スイッチ, スイングアームモーターはの高速で移動します 50;
5)旅行モーター速度制限調整
押し続けます “速度調整を有効にします” ボタンと回転します “速度調整” 自動切断中に移動モーターの最大速度制限を調整する;
6)自動切断
最初のステップは、メインモーターを開始することです; 2番目のステップは、ウォーキングモーターの最大速度制限を調整することです; 3番目のステップは、移動することです “フォワード/リバース” 前方または後方に切り替えて、自動切断モードに入る;
7)パラメーターメニュー (ユーザーは許可なく変更することを禁止されています)
パラメーターメニューを入力します:手動モードで, 主なモーター速度があるとき 0, フォワード/リバーススイッチを3回続けて押します, そして、パラメーターメニューを入力するために3回続けて押し下げます;
パラメーターメニューを終了します: 速度調整ノブを回します, 保存するかどうかを選択します, [有効化]ボタンを押して確認します;
定格電流: メインモーター電流の最大値, ユニットアンペア;
速度調整パラメーター: 自動切断制御パラメーター, デフォルト 800, ユニットミリ秒,変更は禁止されています;
減速パラメーター: 切断電流の変化値がこの値を超える場合, 急速な減速が始まります, ユニットアンペア;
加速A1: 切断電流が設定された切断電流よりも低い場合, 速度値は、ウォーキングモーターの加速ごとに増加しました;
減速A2: 切断電流が設定された切断電流よりも高い場合, ウォーキングモーターの減速ごとに減少する速度値;
スイングアーム電流: デフォルト値, 変更は禁止されています;
停止時間: 自動モードの後、電流の過負荷がシャットダウンします, 一定期間後に電流が再び検出されます. セット電流よりも少ない場合, ウォーキングモーターは自動的に開始されます; ユニットセカンド, デフォルト値, 変更は禁止されています;
最大電流: 主なモーターフィードバック電流の範囲, ユニットアンペア;
最大ホスト: リモートコントロールメインモーター速度調整ディスプレイ範囲;
最大のウォーキング: 無効なパラメーター;
速度制限オフセット: 自動切断中, リモートコントロールは、ウォーキングモーター速度制限=を表示します 50% このパラメーターの;
感度を高めます: 主なモーターフィードバック電流が増加すると, 増加がこの値を超えるたびに, ウォーキングモーターが加速します;
感度を低下させます: メインモーターのフィードバック電流が減少すると, そして、減少値がこの値を超えるたびに, ウォーキングモーターは減速します;
感度オフセット: 感度パラメーターのオフセット増分を追加して減算します;
電流を設定します: 自動切断, 主なモーターフィードバック電流のしきい値. この値を超えた場合,ウォーキングモーターは減速し始めます;この値の下, ウォーキングモーターが加速し始めます;ユニット: アンペア;
アイドリング出口: 自動モードが始まるとき, 主なモーターフィードバック電流がこの値よりも少ない場合,アイドリングモードになります。, アイドリングモードを終了し、切断モードに入ります。ユニットはアンペアです;
ロード電流なし:自動モードが起動するとき, 主なモーターフィードバック電流がこの値よりも少ない場合,それはノーロードモードです。, ノーロードモードを終了し、切断モードに入ります。ユニットはアンペアです;
スイングアームスピード: 起動時のスイングアームモーターの初期速度;
切断モード: ブレードソーとワイヤーソーモードを切り替えます, また、パラメーターはスイッチ後にそれに応じて切り替わります; ブレードソーモード, リモートコントロールディスプレイはスイングアームモーターを追加します, ワイヤーソーモードで, スイングアームモーターはありません;
デバウンスタイム: 主なモーターフィードバック電流が停止電流を超える場合, フィードバック電流は継続的に検出されます. デバウンス時間は、この連続検出の期間です。今回は, メインモーター電流がまだ停止電流を超えている場合, ウォーキングモーターが停止します;さもないと, ウォーキングモーターが停止します. モーターは続けます;
電流を停止します: 主なモーターフィードバック電流はこの値を超えています, そして、ウォーキングモーターが停止します;ユニットはアンペアです;
オフセットデフォルト: リモコンがオンになっているときのウォーキングモーター速度制限の初期値= 50% この値の;


この製品の最終的な解釈の権利は、当社にのみ属します.